基于μC/OS-II的整車控制器系統設計技術

3.2 μC/OS-II的移植
μC/OS-II操作系統在XC164CS微處理器上的移植主要實現對3個文件OS_CPU.H、OS_CPU_C.C、OS_CPU A.ASM的處理。
3.2.1頭文件INCLUDES.H
INCLUDES.H頭文件應被包含到所有C文件的第1行。盡管包含不相關文件可能會增加文件的編譯時間,但增強了代碼的可移植性。用戶可以編輯增加自己的頭文件,但必須添加在頭文件列表的最后。
3.2.2 OS_CPU.H文件
OS_CPU.H文件中包含與處理器相關的常量、宏和結構體的定義。針對XC164CS處理器,定義堆棧數據類型為16位,棧向下遞減;將μC/OS-II控制中斷的2個宏OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()定義為微控制器關閉(SETC)和打開(CLRC)中斷的指令;聲明OS_TASK_SW()函數,中斷服務程序ISR的入口指向函數OSCtxSw()。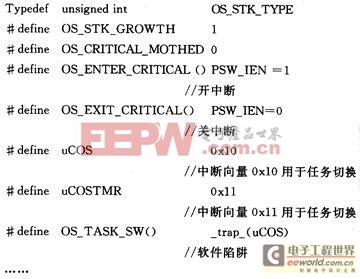
3.2.3 OS CPU A.ASM
μC/OS-II移植時要求用戶編寫4個匯編語言函數:OSStartHighRdy()、OSCtxSw()、OSIntCtxSw()和OSTickISR()。
(1)OSStartHighRdy()
調用該函數使處于就緒狀態的優先級最高的任務開始運行。由于實時操作系統是不返回的函數,所以調用后需移去堆棧棧頂的返回地址,然后執行用戶調用函數OSTaskSwHook(),最后開始運行多任務,獲得優先級最高的任務的指針,根據這個指針從任務堆棧中恢復所有寄存器,恢復完后執行中斷返回,運行就緒態任務。
(2)OSCtxSw()
當從低優先級的任務切換到較高優先級的任務時,調用任務切換函數OSCtxSw()保存處理器的內容和任務指針到當前任務的任務堆棧,然后執行用戶調用函數OSTaskSwHook(),最后從要執行任務的任務堆棧里恢復寄存器和堆棧中的內容,執行中斷返回指令開始運行新的任務。
(3)OSIntCtxSw()
當需要在中斷發生后切換到更高優先級的任務時,調用中斷級任務切換函數OSIntCtxSw(),然后執行用戶調用函數OSTaskSwHook()。因為該函數是在中斷程序中被調用,所以不需要保存中斷任務的寄存器;中斷子程序在調用函數OSInExit()時,將返回地址壓入堆棧,在這里不需要再返回,所以必須從堆棧中清理掉返回地址。
(4)OSTickISR()
OSTickISR()是μC/OS-II中的時鐘節拍中斷服務程序。在每個時鐘節拍調用該函數,給每個處于延時的任務延時減1,并檢查所有處于延時狀態的任務是否延時結束成為就緒任務。然后調用OSIntExit(),如果有優先級更高的任務就緒,OSIntExit()就會進行任務調度。OSIntExit()并不返回調用者,而是用新的任務堆棧中的內容來恢復CPU現場,由中斷返回執行新的任務。
3.2.4OS_CPU_C.C
用戶需要編寫6個C語言函數OSTaskStkInit()、OSTaskCreateHook()、OSTaskDelHook()、OSTaskSwHook()、OSTaskSatHook()、OSTimeTickHook()。其中,唯一必要的是OSTaskStkInit(),其他5個必須聲明,但可以不包含代碼。
OSTaskStkInit()由任務創建函數OSTaskCreate()或OSTaskCreateExt()調用,在建立每個任務的時候初始化任務堆棧。開始運行這個任務就是模擬中斷返回,把初始化后堆棧中保存的值恢復到各個寄存器。初始化任務堆棧時,要傳遞任務代碼起始指針(Ptask)、參數指針(Pdata)、任務堆棧棧頂指針。任務堆棧初始化完成后,返回一個新的堆棧棧頂指針,OSTaskCreate()或OSTaskCreateExt()將它保存到OSTCB中。
在OS_CPU_C.C文件中可以創建5個鉤子函數,使用的前提是配置文件中常量OS_CPU_HOOKS_EN使能。
至此,μC/OS-II操作系統的移植基本完成。
4 整車控制器軟件多任務設計
整車控制器軟件設計以實時操作系統作為開發平臺,將應用程序分解成多任務,簡化了系統軟件的設計,保證了整車控制系統的實時性,提高了系統的穩定性與可靠性。整個系統的主程序流程如圖3所示。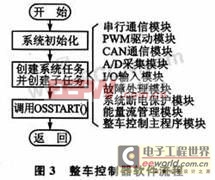






評論