基于PWM技術(shù)的模數(shù)轉(zhuǎn)換器設(shè)計(jì)方法

本設(shè)計(jì)所采用的是MSP430F1232微控制器,具有非常高的集成度,除內(nèi)部帶有具有PWM功能的定時(shí)器外,片內(nèi)還集成了10通道的1 0位A / D轉(zhuǎn)換、溫度傳感器、USART、看門狗定時(shí)器、片內(nèi)數(shù)控振蕩器DCO、大量的具有中斷功能的I/O 端口、大容量的片內(nèi)Flash 和RAM 以及信息Flash 存儲(chǔ)器[4]。其中的16位定時(shí)器A中帶有3個(gè)捕獲/比較通道,內(nèi)部的Flash 存儲(chǔ)器可以實(shí)現(xiàn)掉電保護(hù)和軟件升級(jí)。由此采用MSP430單片機(jī)作為該設(shè)計(jì)的處理器,不但可簡(jiǎn)化系統(tǒng)電路設(shè)計(jì)、縮短開發(fā)周期,降低系統(tǒng)功耗,還可利用其內(nèi)部集成的溫度傳感器,方便的對(duì)被測(cè)模擬量進(jìn)行溫度補(bǔ)償,從而使系統(tǒng)的測(cè)試精度得以提高。
4. A/D 轉(zhuǎn)換分辨率分析及主程序設(shè)計(jì)
由于采用PWM技術(shù)的A/D轉(zhuǎn)換器的分辨率取決于控制PWM脈沖占空比的定時(shí)器的計(jì)數(shù)值位數(shù)或字長(zhǎng),因此可通過改變定時(shí)器計(jì)數(shù)位數(shù)來改變A/D轉(zhuǎn)換的分辨率,而MSP430單片機(jī)的內(nèi)部定時(shí)器A中的計(jì)數(shù)器字長(zhǎng)為16位,因此其PWM信號(hào)占空比的調(diào)整范圍為0~216-1,于是當(dāng)系統(tǒng)定時(shí)器的計(jì)數(shù)器字長(zhǎng)為16位時(shí),采用PWM技術(shù)的A/D轉(zhuǎn)換器的最大分辨率可達(dá)16位。由于單片機(jī)內(nèi)部的16位定時(shí)器采用晶振作為內(nèi)部計(jì)數(shù)器的工作時(shí)鐘,因此其定時(shí)精度一般都較高,且其計(jì)數(shù)值與PWM脈沖占空比成嚴(yán)格的線性關(guān)系,輸入脈沖精確,因此A/D轉(zhuǎn)換的線性度和精度較好,線性度誤差小于1%。轉(zhuǎn)換速率與分辨率和選取的PWM信號(hào)的周期有關(guān),分辨率越高,轉(zhuǎn)換時(shí)間越長(zhǎng),但同采用V/F方式相比較,轉(zhuǎn)換速度要快的多。
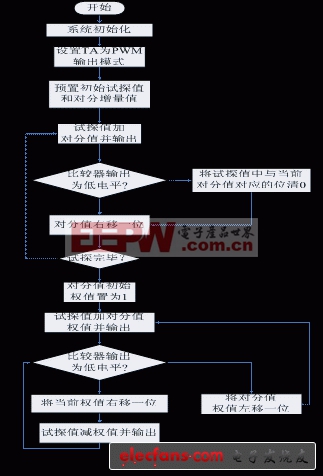
為了能夠縮短試探時(shí)間提高在高分辨率下的采樣速度,采用改進(jìn)的逐次逼近的對(duì)分試探法使得試探值能夠迅速逼近被測(cè)模擬量。常規(guī)的對(duì)分試探法是每次試探開始時(shí),首先將最大計(jì)數(shù)值的一半(即字長(zhǎng)對(duì)分值)作為試探初值并將其轉(zhuǎn)換成PWM信號(hào)輸出,相當(dāng)于輸出1:1占空比的PWM脈沖信號(hào),然后測(cè)試比較器的狀態(tài),以確定當(dāng)前試探值的大小,若試探值小于被測(cè)模擬量,則保留當(dāng)前試探值,否則去掉,然后再將剩余值的一半(即:剩余對(duì)分值)作為新的增量與上次保留值相加后產(chǎn)生新的試探值并將其轉(zhuǎn)換成PWM脈沖信號(hào)輸出,再測(cè)試比較器的狀態(tài),若大于被測(cè)模擬量,則去掉當(dāng)前增量,否則保留,隨后每次的輸出都將剩余對(duì)分值作為增量進(jìn)行試探,一直持續(xù)的試探下去,直到試探完與分辨率相當(dāng)?shù)拇螖?shù),例如:實(shí)現(xiàn)具有16位分辨率的A/D轉(zhuǎn)換就要試探16次。由于該方法在采樣時(shí)無(wú)論當(dāng)前采樣值試探值多么接近被測(cè)值,其每次采樣的試探次數(shù)都相同,為減小試探次數(shù)提高采樣速率,在本設(shè)計(jì)中采用了一種改進(jìn)的逐次逼近試探算法,可大大減少試探次數(shù),其具體實(shí)現(xiàn)的方法是:當(dāng)?shù)谝淮卧囂酵瓴@得采樣值后,保留當(dāng)前采樣值,不再以剩余對(duì)分值作為新的增量,而是以最小值作為初次增量(即:將最低位置1,可將其看作權(quán)值),與上次保留值相加并轉(zhuǎn)換成PWM信號(hào)輸出,通過測(cè)試比較器輸出確定當(dāng)前增量值是否需要保留,若試探值小于被測(cè)模擬量,則保留當(dāng)前試探值,否則去掉。若需要增大試探值時(shí),則可將權(quán)值左移一位再與上次試探值相加,以形成新的試探值,這樣可以使逐次逼近試探值總處在跟蹤試探狀態(tài),從而大大減少了試探次數(shù)。由于在實(shí)際測(cè)試過程中被測(cè)模擬量一般很少有突變情況發(fā)生,大都處在緩變?cè)黾踊蚓徸儨p小狀態(tài),因此采用這種改進(jìn)的逐次逼近的試探算法,將會(huì)有效的提高A/D轉(zhuǎn)換器的采樣速率。
采用PWM技術(shù)的A/D轉(zhuǎn)換器的主程序,采用匯編語(yǔ)言編寫。其主程序流程圖如圖5所示:
5. 結(jié)束語(yǔ)
采用普通元器件利用MCU內(nèi)部定時(shí)器結(jié)合PWM技術(shù)設(shè)計(jì)高分辨率的A/D轉(zhuǎn)換器,改變A/D轉(zhuǎn)換的分辨率只須修改PWM定時(shí)器的有關(guān)參數(shù)即可,靈活方便,穩(wěn)定性好,線性度高,由于該轉(zhuǎn)換器與系統(tǒng)的連接僅為兩條信號(hào)線,因此,可以很方便的采用光電隔離技術(shù)提高系統(tǒng)的抗干擾能力,另外由于電路中的低通濾波環(huán)節(jié),使得電路本身也具有一定的抗干擾能力,這比較適合在具有較強(qiáng)的干擾環(huán)境中使用,采用改進(jìn)的逐次逼近試探算法實(shí)現(xiàn)對(duì)模擬電壓的測(cè)量或A/D變換,提高了采樣速率,轉(zhuǎn)換電路設(shè)計(jì)及算法實(shí)現(xiàn)簡(jiǎn)單,測(cè)試分辨率和精度較高,具有較好的應(yīng)用價(jià)值。

pwm相關(guān)文章:pwm原理







評(píng)論