基于LIN總線的汽車分級制網絡結構

處于睡眠狀態的LIN網絡中的任何一個節點都可以請求喚醒總線,總線上的所有節點在接收到喚醒請求后應脫離睡眠狀態并為接收總線命令做好準備。主機節點接收到喚醒請求后也被喚醒,并在從機節點準備好之后發送幀頭,尋找喚醒原因。
3.4錯誤檢測和處理
LIN規范定義了六種不同類型的報文錯誤:位錯誤、校驗和錯誤、標識符錯誤、從機不響應錯誤、總線不活動錯誤和同步場不一致錯誤。主機節點和從機節點分別檢測這六種錯誤中的若干種。
4.LIN應用設計
LIN是一種低速串行總線,其提出是針對汽車應用的,主要用于汽車電子控制系統,實現智能傳感器、執行器等的連接。LIN定位于汽車上的下層局部網絡。由CAN構成汽
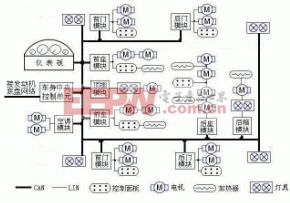
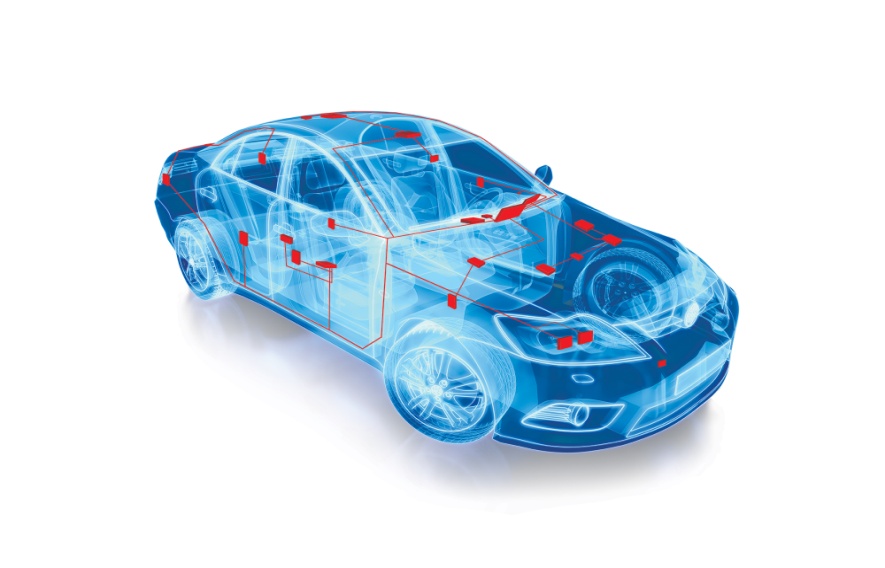
圖4基于CAN/LIN的分級制汽車網絡
車的上層主干網絡,而在不需要CAN的高速與多功能性的場合則由LIN來構成下層局部網絡,實現分級制網絡結構,以達到合理分配利用網絡資源、提高線路布置的方便靈活性、降低成本的目的。典型的基于CAN-LIN總線的分級制汽車車身網絡如圖4所示。
現以車門LIN網絡為例介紹LIN總線設計的一般方法。
車門控制LIN網絡的結構及其在車門上的布置如圖5所示,該網絡由主機節點、后視鏡從機節點、搖窗機從機節點、門鎖從機節點構成。
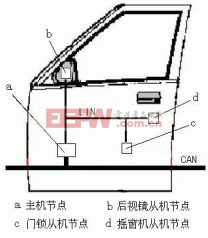
圖5車門控制LIN網絡
主機節點采集本地各控制開關的狀態并接受CAN總線上的遠程信息,據此產生控制指令,并將指令轉換為LIN報文幀通過LIN網絡發送給相應從機節點,從機節點接收到與自己相關的報文幀后對報文幀進行拆封、解讀,然后根據獲得的指令控制相應的執行器動作,從而實現對車門各部件的控制。同時,在需要時從機節點分別將其控制部件所處狀態反饋給主機節點,主機節點再將該狀態信息通過指示燈或喇叭提供給駕駛員或通過CAN總線發送給其他控制單元。主機節點也作為本LIN網絡與上層CAN網絡連接的網關。



評論