LIN總線:汽車車身控制應用標準

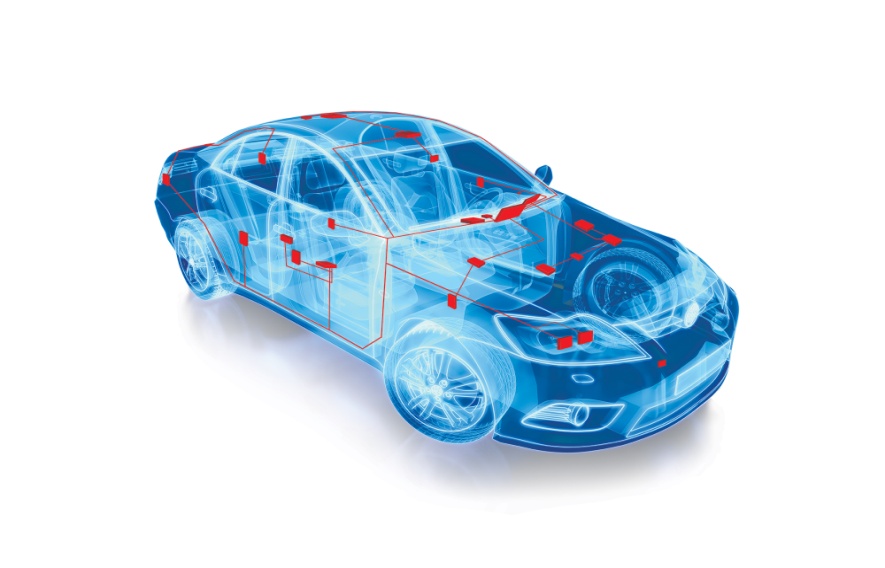
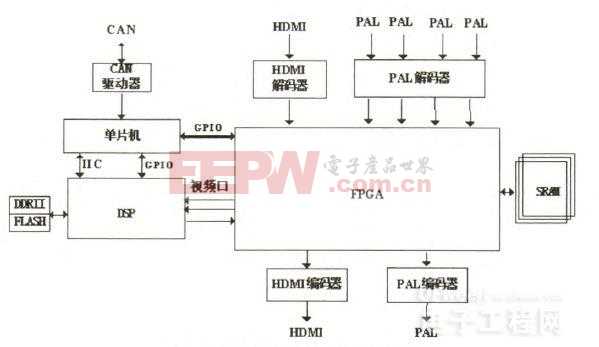
加爾文制造公司(今摩托羅拉公司)在二十世紀三十年代推出車載收音機時,沒有幾個人能看清其未來。多年來這種收音機一直是唯一的車載電子組件。當今汽車中的信息娛樂系統僅僅是眾多電子控制系統之一:當今現代汽車中的電子控制單元(ECU)數量多達80種(如圖1所示)。汽車電子組件市場自然一直保持增長勢頭,到2018年市值有望達到185億美元。
本文引用地址:http://www.104case.com/article/269127.htm在最初幾年,汽車采用獨立自主電子系統。后來很快意識需要一種支持系統間相互通信的機制。這不僅催生出諸如能夠協調各個電子系統的串行通信信道(總線)等網絡,同時也促進了汽車整體功能改進。
圖1:多個車載電子系統
汽車網絡:
1983年,博世公司開始開發控制器局域網(CAN)總線,并且在1986年正式發布相關協議。目前有多種不同汽車總線標準,但是CAN仍然是最流行的標準。在CAN網絡中,所有節點(源于不同的ECU)都擔當主節點(即,不存在主從拓撲結構),而且并不分配具體地址。而是由消息攜帶標識符。
在給定時間,多個節點可以同時向CAN總線發送數據。然后由消息標識符幫助確定消息的優先級。最高優先級的消息會使CAN總線進入顯性狀態(dominant state),而所有其他節點會停止發送。這些節點實際上是收發器,除發送消息之外,其可以根據特定功能從總線查找特定消息。因此,CAN總線所連接的不同節點之間會出現信息流。
由于CAN會進行填充錯誤、誤碼、校驗和錯誤、誤幀以及應答錯誤等多項錯誤檢查, 因此具有高可靠性。CAN支持高達1Mbps的數據傳輸速率,從而成為連接汽車關鍵功能ECU(如:變速箱、溫度傳感器等)的默認選擇。
為什么選擇LIN?
但是,汽車電子的作用并非僅僅局限于這些關鍵單元。車身電子市場多年來一直在增長。典型車身控制應用包括座椅、車窗、智能雨刷以及汽車空調傳感器等。對車身電子的關鍵要求是確保汽車更舒適、更安全。盡管這些系統可能不要求像關鍵ECU那樣的高安全性,但是它們仍然需要一定的汽車網絡通信標準。
其所需不同網絡系統與類型分類如下:
- 常規車身與動力總成應用采用具有實時特性的協議,主要是需要CAN;
- 多媒體應用需要更高的帶寬與速度,甚至需要無線互聯。所采用的網絡包括Bluetooth、MOST 或Firewire;
- 安全關鍵應用需要具備可靠性和容錯的協議。時間觸發CAN(TT-CAN)和FlexRay是其所采用的典型網絡;
- 座椅、車窗、雨刷,甚至某些復雜的ECU中的智能傳感器及促動器具有更低的通信需求。這些應用通常采用定制OEM協議尋址,其通信并不需要采用CAN或FlexRay接口。
對于最后一類應用而言,由于OEM廠商采用其自有協議,因此OEM的供應商在沒有標準情況下設計不同系統會面臨一些難題,如:復雜性與費用。所以,不同汽車制造商在二十世紀九十年代后期共同成立了LIN聯盟。該聯盟在2002年終于實現了此類系統的聯網標準,其稱為LIN。
LIN與CAN對比:
實現CAN比實現LIN的成本高。導致CAN成本更高的因素包括:
- CAN網絡中的每個節點都需要時鐘發生器或晶體;
- CAN的芯片級實現起來更復雜
- 采用雙線傳輸。
最重要的是,整個昂貴的架構對于不需要高可靠性和高數據速率的應用來說過于奢侈。
上述種種缺陷促進了對LIN網絡需求增長。LIN總線的作用是補充而非替代CAN總線。它是一種支持汽車網絡遠程以及非關鍵應用的低成本串行通信協議。與CAN不同,LIN采用主從拓撲結構。這種網絡一般包含一個主節點和多達16個從節點。所有通信均由主節點發起。由于所有節點都是由主節點進行時鐘控制,因此只有主節點中需要精密時鐘。這是使LIN成本低于CAN的原因之一(CAN中的所有節點都需要采用晶體或精密時鐘發生器)。
LIN特性與優勢:
LIN的主要特性與優勢如下:
1. 補充作用 – 如前所述,LIN的作用并非是替代而是補充CAN。此特性有助于CAN擴展到應用中的遠程分級子網。
2. 單線實現 – LIN的低成本單線實現方案(不同于CAN的雙絞線實現方案)可以顯著降低成本。
3. 數據速率 –出于EMI控制原因,數據速率限速為20Kbps,這有助于保持網絡的可靠性。
4. 廣播串行網絡 – LIN網絡可以采用一個主節點和多達16個從節點。所有消息均從主節點始發并且最多由1個從節點根據消息標識符做出響應。
5. 自同步 – 無需晶體或諧振器,從而能夠大幅降低實現成本。
6. 等待時間 – LIN網絡可以提供保證等待時間,從而使其成為預測性更高的網絡。
7. 整體實現 – LIN比CAN的實現成本和復雜性更低。對于CAN,其每個節點都需要CAN接口、晶體和雙線連接。而LIN通過簡單的串行通信模塊(SCB)和增強型ISO 9141接口便可工作,無需晶體,而且是采用單線連接。
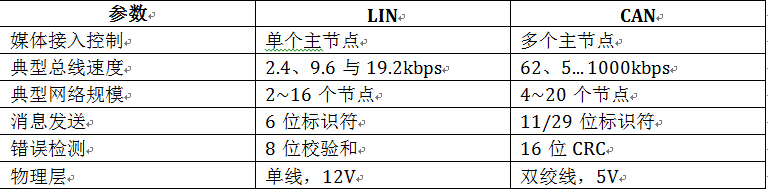
表1提供LIN與CAN特性的快速對比,以幫助開發人員根據不同參數需求選擇網絡:
表1:LIN與CAN對比



評論