基于攝像頭的AD黑線提取算法


圖5 AD采樣圖
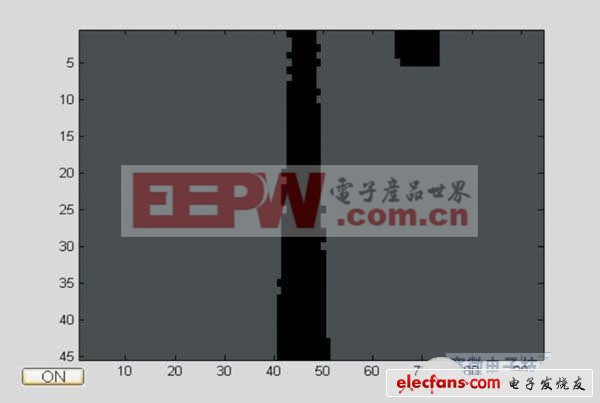
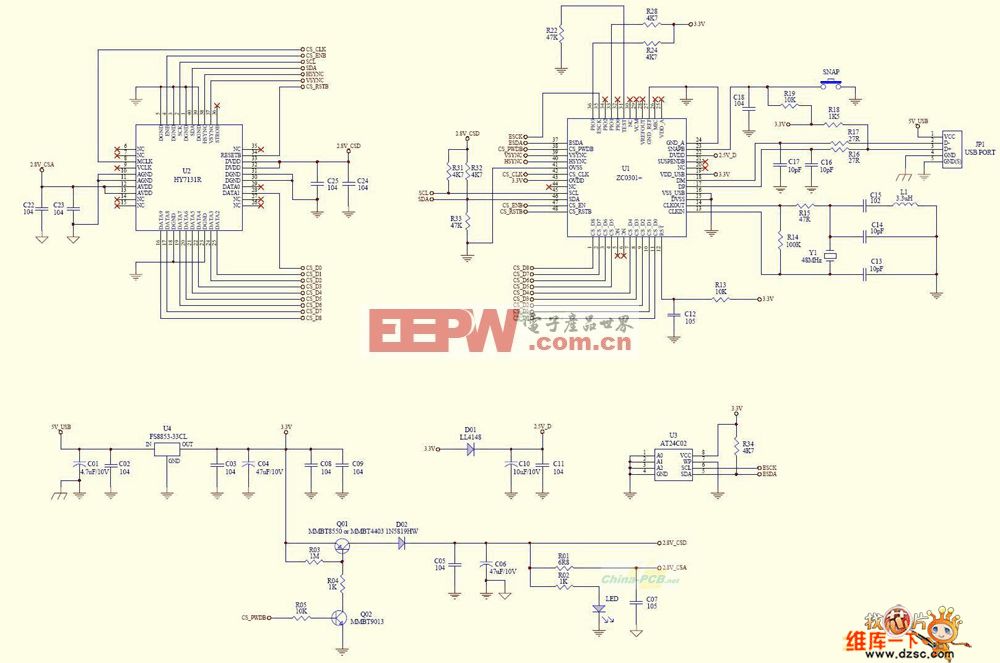
圖6 硬件采樣圖
可以看到它的黑線非常明顯,效果很好。
但是這種方法也存在著它的很多局限性:
首先,它對環境的要求很苛刻,不能有縫,不能有反光。由于縫的顏色明顯易于周圍的顏色,因此在圖像上它就表現為一條黑線。其次由于反光的作用使得反光區域光線異常強烈。反光區在圖像上也是一片黑,使得白變黑。
其次,它對橫向的分辨能力很弱。使得它對起始道的區分非常困難。比如起始道在圖像上往往會把中間的黑道變成白道,使得起始道的辨別以及黑線的提取困難。
最后,對于十字交叉道,由于一行全是黑線,電壓無跳變,因此在圖像上它是一條白線,使得賽道出現斷點。出現黑變白。更糟糕的情況是稍微斜看十字叉時,它會出現起始道的特征。使得賽車亂停機。
上述的黑變白以及白變黑的出現,很大程度上抵消了它所帶來的方便性,軟件必須對于采到的黑線加以認真判別它是否是真的黑線,這就涉及到許多方面的濾波。再則,由于單片機讀取的僅僅是0-1信號,丟失了每個點的之間細微的黑白程度,這給濾波也帶來極大的難處。為了正確提取黑線它涉及到本文所提到過的所有濾波方式,包括線寬設置,黑線的連續性等等。
但是它帶來的最大困難還是起始道的判別問題。起始道的干擾不僅來自十字交叉線,而且還來自一般賽道,因為很有可能在賽道的兩側由于光線反射的不均衡導致電壓的跳變,使得在黑線的旁邊隔著一段白斑出現幾段的黑線,很容易誤認起始道,最終導致起始道根本無法識別。
基于以上的分析,最后我們還是選用了AD的第三種方法,它簡單,實用,效果很理想。
它的流程圖以及程序代碼如下:
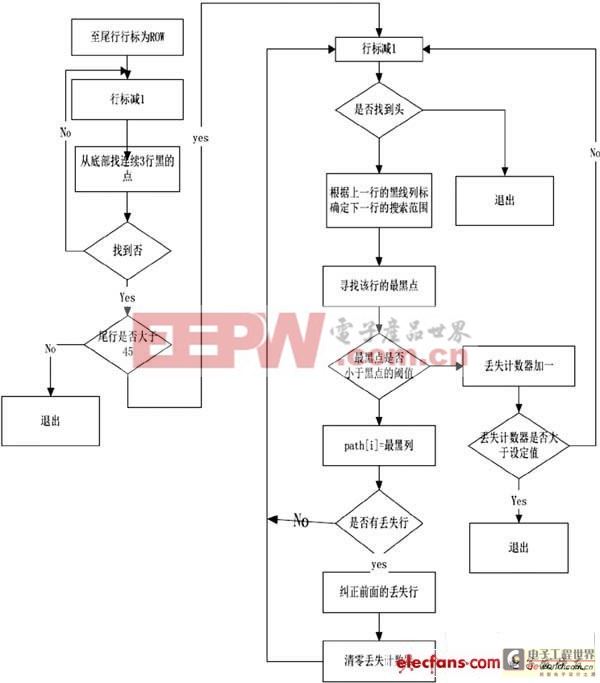
圖7 流程圖









評論