基于攝像頭的AD黑線提取算法

圖2 三行相加提取黑線示意圖
加了以上的濾波以后真個搜索賽道程序會顯得十分復雜,而且也不是十分可靠。
第二種做法: 利用若干行相加,取最黑點。
這種做法是我們上屆的學長提出來的算法。但是我利用起來不是很可靠。它的頭點始終采不穩定。它的三行相加的理由是若中間一行右黑點丟失,它可以利用自己設定的閾值把它找回,如三行相加的黑點閾值可以定義為1個白點與2個黑點的和。帶有些中值濾波的味道。 但是,由于遠處的黑白不是很清楚,本來黑白的閾值就難以設定,三行相加的閾值就更難設定。而且在彎道上由于遠方的點本來就少,大約只有一兩個黑點而且又不在同一列上,很容易將這些點丟失,導致頭部的點不穩定。為了盡可能地將遠方的黑線提取出來,從軟件上將唯一的方法就是增大閾值,比如將三行相加的閾值設置為一黑二白相加,但是問題是遠方的黑白不是很明顯,白點比較黑,黑點比較白,這種閾值的選取很容易造成把遠方的那些比較黑的白點也一并歸入黑線之中,這使得小車的轉向發生混亂。
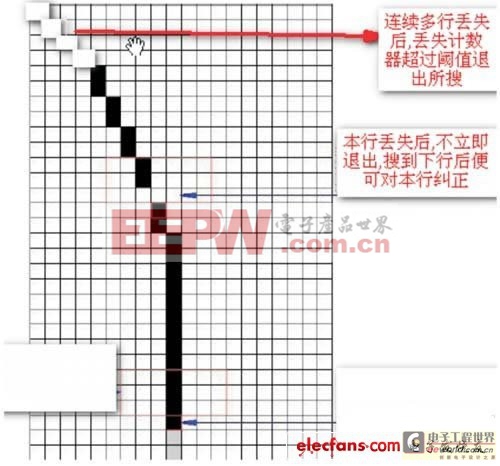
圖3 逐行找黑點
第三種做法: 找出每行的最黑點,把它作為道路。
由于每行搜索的是最黑點,因此可以將黑點的閾值稍稍擴大一點,即使遠方的黑白不清,由于找的是最黑點因此還是可以提取出真確的黑線的。它的主要問題是,不一定每行都有符合要求的點,會造成一行丟失而失去后面的黑點。解決的方法是當發現一行丟失以后,不立即退出搜索,而是置一個丟失計數器,只有當丟失計數器的值連續累加到一定的閾值后才退出。當每次搜索到一行的黑線后看看丟失計數器是否為非零。若不是,則說明前面沒有丟失行。若是,則說明前面有幾行丟失了。我們可以根據這一行與上以有效行對中間的丟失行對中間的丟失行做一個線性化處理。然后清零丟失計數器。有了丟失計數器,我們可以對賽道的提取條件加以嚴格的限制,而不必擔心黑線的漏檢。比如我們可以嚴格限制黑線的寬度,這樣我們可以很容易濾除看到大塊的黑斑帶來的干擾;對于上述的斜看十字交叉線的問題我們只要根據上一行的黑線嚴格限制下一行黑線出現范圍便可輕松濾除。當然在發現丟失行以后對于下一行的搜索必需加大黑線搜索的范圍,允許的連續丟失行越多則再次找回的黑線的可信度也就越低,在實際的提取過程中必須把握好這一閾值,使得即可以順利找到前方的道路,又不至于誤提取黑線。實際證明這種方法實現簡單,可靠性也最高,黑線提取十分穩定。
硬件濾波(電壓跳變比較)
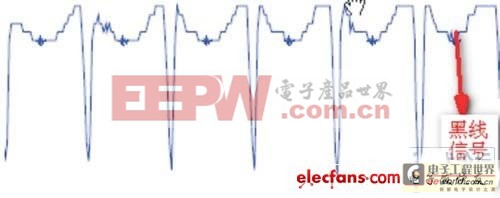
圖4 攝像頭的視頻輸出信號
從攝像頭的視頻輸出信號,我們可以看出在黑線與白線之間有一個明顯的電壓跳變過程,我們可以利用這一特點來作為黑線的提取標志。利用合理的硬件電路我們變可以實現在電壓跳變以前輸出邏輯1,在電壓跳變后輸出邏輯0.這樣單片機要做的就是不停地讀取引腳的電平狀態。由于不需要AD轉化,這使得單片機在每個視頻的行中斷中讀取比AD多得多的點,黑點的個數自然也很多。在提取黑線是軟件要做的就是區分0與1而已,實現起來非常方便。下面是一幅由這種









評論