DIY Arduino和藍(lán)牙控制機(jī)器人手臂項(xiàng)目

在這個(gè)項(xiàng)目中,我將向你展示如何使用Android手機(jī)建立一個(gè)Arduino和藍(lán)牙控制的機(jī)器人手臂。這個(gè)機(jī)械臂既可以在手動(dòng)模式下操作,也可以在全自動(dòng)模式下編程操作。
本文引用地址:http://www.104case.com/article/202304/445922.htm你們已經(jīng)在Electronics Hub看到了一個(gè)機(jī)械臂項(xiàng)目,我們從廢品中獲得了一切(除了電機(jī)和Arduino)。我們從你們那里得到了非常好的反應(yīng),在此基礎(chǔ)上,我們決定做一個(gè)更好的版本,如果我必須說,是2.0版。
這個(gè)DIY Arduino和藍(lán)牙機(jī)器人手臂項(xiàng)目是通過藍(lán)牙通信的安卓手機(jī)操作的。我們已經(jīng)為安卓手機(jī)開發(fā)了一個(gè)應(yīng)用程序,你可以用它來控制機(jī)械臂進(jìn)行手動(dòng)操作或?yàn)槿詣?dòng)操作編程。我將在后面的章節(jié)中解釋這些。

DIY Arduino和藍(lán)牙控制的機(jī)器人手臂 圖片1

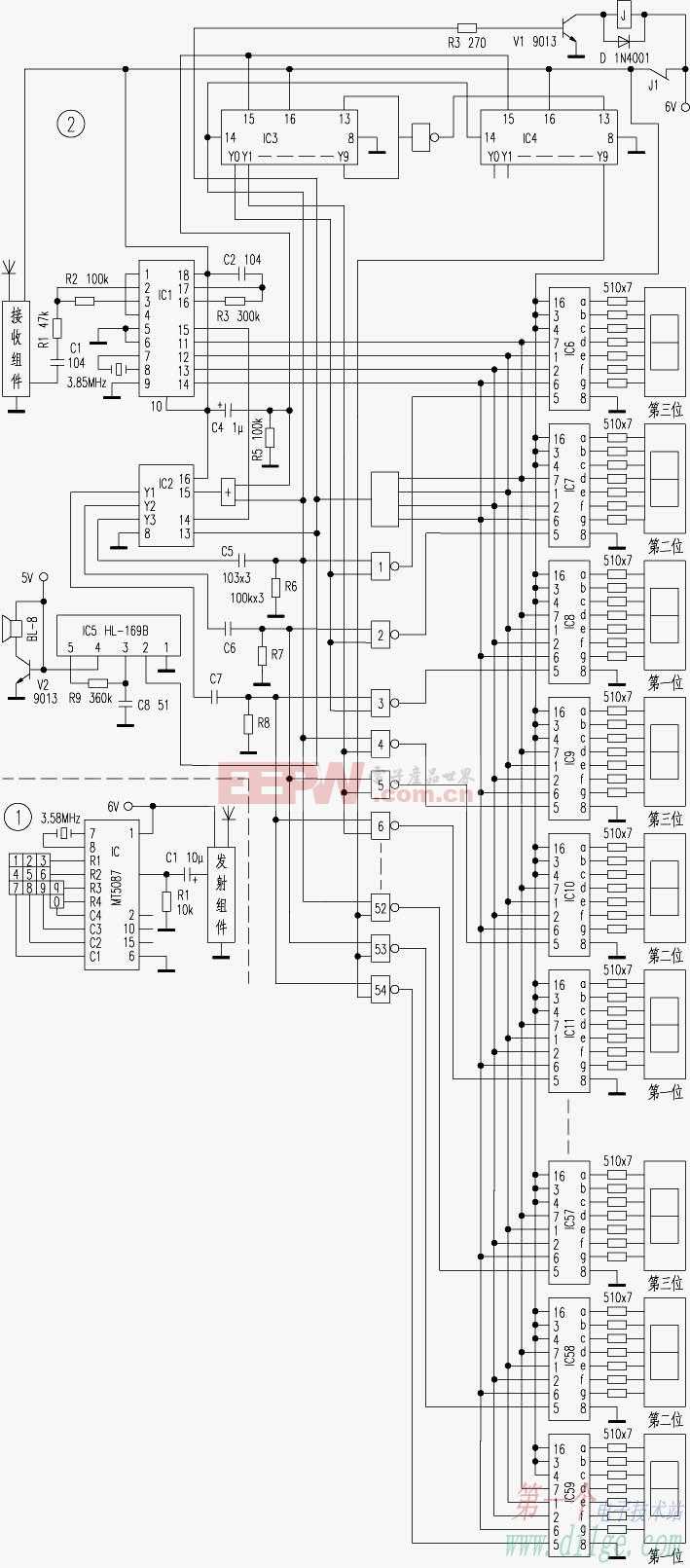
Arduino和藍(lán)牙控制的機(jī)器人手臂的電路圖
讓我們從Arduino和藍(lán)牙控制的機(jī)械臂項(xiàng)目的電路圖開始。下面的圖片顯示了所有必要連接的電路圖。電路圖看起來非常簡(jiǎn)單,但機(jī)械臂的構(gòu)造部分卻有點(diǎn)復(fù)雜。
機(jī)器人手臂項(xiàng)目所需的組件
Arduino UNO
4 x Tower Pro MG90S 金屬齒輪伺服電機(jī)
HC-05藍(lán)牙模塊
3D打印的機(jī)器人手臂部件,以及必要的螺絲、螺母和螺栓
為Arduino和4個(gè)伺服電機(jī)提供適當(dāng)?shù)碾娫?nbsp;
連接線
安裝有自定義應(yīng)用程序的安卓手機(jī)
部件描述
Arduino UNO和藍(lán)牙模塊在組件列表中是非常直接的,但有趣的組件是金屬齒輪舵機(jī)和3D打印的機(jī)械臂部件。
金屬齒輪舵機(jī)MG90S
機(jī)械臂結(jié)構(gòu)中使用的伺服機(jī)是TowerPro MG90S金屬齒輪微型伺服機(jī)。我們選擇這種特殊的舵機(jī)是因?yàn)槠胀ǖ乃芰淆X輪舵機(jī)不穩(wěn)定,而且失速扭矩也較小。

在6.6V電源下,這種金屬齒輪舵機(jī)提供了2.2Kg/CM的失速扭矩(這比普通SG90舵機(jī)的扭矩要大得多)。
3D打印的機(jī)器人手臂
任何機(jī)械臂項(xiàng)目的重要特征之一是美學(xué)。daGHIZmo設(shè)計(jì)了一個(gè)名為EEZYbotARM的3D機(jī)械臂,并將文件上傳到Thingiverse網(wǎng)站。
基于這些3D模型文件,我們使用當(dāng)?shù)氐?D打印機(jī)網(wǎng)點(diǎn)制作了零件。質(zhì)量非常好,尺寸也非常接近真實(shí)物體(不精確)。

如果你觀察上面的圖片,我已經(jīng)把機(jī)器人手臂的部分指定為底座、肩部、肘部和握把。因此,伺服電機(jī)也被命名為底座伺服、肩部伺服、肘部伺服和握把伺服。
電路設(shè)計(jì)
如前所述,該電路的設(shè)計(jì)非常簡(jiǎn)單。4個(gè)伺服電機(jī)的控制信號(hào)被連接到Arduino UNO的4個(gè)PWM引腳,如下所示: 底部伺服--引腳3,肩部伺服--引腳5,肘部伺服--引腳6,握力伺服--引腳9。
所有的伺服電機(jī)都有一個(gè)6V的電源,而Arduino UNO則有一個(gè)9V的電源。HC-05藍(lán)牙模塊的TX和RX連接到Arduino的RX0和TX0針腳,即針腳0和1。
注意:在對(duì)Arduino進(jìn)行編程時(shí)不要連接藍(lán)牙模塊。
組裝3D打印的機(jī)械臂部件
如果我解釋機(jī)器人手臂3D部件的逐步組裝過程,這將是一個(gè)非常冗長(zhǎng)和無聊的閱讀。因此,我將張貼一些完成的機(jī)器人的照片,并將制作一個(gè)單獨(dú)的視頻,介紹如何組裝機(jī)械臂。同時(shí),請(qǐng)看一下這些圖片。





用于Arduino和藍(lán)牙控制的機(jī)械臂的安卓應(yīng)用程序
除了使用電位器或通過計(jì)算機(jī)進(jìn)行串行通信外,我們決定再進(jìn)一步,為安卓手機(jī)設(shè)計(jì)一個(gè)簡(jiǎn)單的應(yīng)用程序,以控制機(jī)械臂。
下圖顯示了在運(yùn)行安卓6.0版本的智能手機(jī)上的應(yīng)用程序布局。但該應(yīng)用程序已在安卓8.0版本中進(jìn)行了測(cè)試,并且工作正常。

有四對(duì)箭頭控制鍵,每對(duì)分別用于肩部、肘部、底座和握把伺服。有一個(gè)程序按鈕,使用它,你可以啟用程序模式。關(guān)于這一點(diǎn),在項(xiàng)目的工作中會(huì)有更多的介紹。
注意:
這個(gè)應(yīng)用程序使用安卓手機(jī)的藍(lán)牙功能。這個(gè)應(yīng)用程序現(xiàn)在還不能在Google Play Store中使用,因?yàn)樗栽跍y(cè)試中。
到目前為止,我們還沒有為iOS開發(fā)一個(gè)應(yīng)用程序。
Arduino和藍(lán)牙控制的機(jī)械臂的工作原理
在這個(gè)項(xiàng)目中,我們?cè)O(shè)計(jì)和開發(fā)了一個(gè)簡(jiǎn)單的、3D打印的、基于安卓手機(jī)的、Arduino和藍(lán)牙控制的機(jī)器人手臂。我們現(xiàn)在將看到這個(gè)機(jī)械臂的操作和工作。
在你的安卓手機(jī)上安裝應(yīng)用程序,并提供必要的權(quán)限來訪問設(shè)備的藍(lán)牙。如果藍(lán)牙模塊(HC-05)沒有與手機(jī)配對(duì),請(qǐng)使用手機(jī)的藍(lán)牙設(shè)置將其配對(duì)。
一旦設(shè)備配對(duì)成功,打開應(yīng)用程序,它將自動(dòng)列出已配對(duì)的藍(lán)牙設(shè)備。選擇正確的藍(lán)牙模塊,如果一切順利,你將進(jìn)入主控板。
在這里,你可以看到機(jī)器人手臂的四個(gè)伺服電機(jī)的控制,即底座、肩部、肘部和握把。使用各伺服電機(jī)的方向鍵,控制機(jī)械臂。這一部分的工作是機(jī)器人手臂的手動(dòng)操作,每一個(gè)動(dòng)作都必須手動(dòng)調(diào)整。

接下來是有趣的部分。你可以看到中間有一個(gè)叫做 "程序 "的按鈕。在操作的任何時(shí)候,如果你按下這個(gè)按鈕,機(jī)械臂就會(huì)RESET(移動(dòng)到一個(gè)默認(rèn)位置),編程模式被激活。
在這種模式下,您可以對(duì)機(jī)械臂進(jìn)行編程,使其以自動(dòng)方式執(zhí)行一系列的任務(wù)。例如,如果您想從一個(gè)地方拾取小物體并將其放置在另一個(gè)地方,您不必一直手動(dòng)調(diào)整數(shù)值。
你所需要做的就是進(jìn)入編程模式,教機(jī)器人手臂按照一系列的步驟來完成任務(wù)。一旦您對(duì)機(jī)械臂進(jìn)行編程,您可以運(yùn)行該程序,它將循環(huán)這些編程的步驟,直到停止。
您也可以隨時(shí)暫停自動(dòng)操作,并從同一地點(diǎn)恢復(fù)。此外,如果您想從編程模式中出來,手動(dòng)操作機(jī)械臂,您可以簡(jiǎn)單地 "關(guān)閉 "編程模式。
Arduino和藍(lán)牙控制的機(jī)器人手臂項(xiàng)目的亮點(diǎn)
這個(gè)機(jī)械臂可以用任何基于安卓系統(tǒng)的藍(lán)牙智能手機(jī)來控制。
安卓手機(jī)的專用應(yīng)用程序可以控制機(jī)械臂。
有兩種操作模式: 手動(dòng)模式和自動(dòng)模式。
對(duì)于常規(guī)或手動(dòng)操作,您可以通過操縱機(jī)械臂的單個(gè)伺服電機(jī)的值來控制機(jī)械臂。
當(dāng)啟用編程模式時(shí),您可以對(duì)機(jī)械臂進(jìn)行編程,實(shí)現(xiàn)全自動(dòng)操作。
機(jī)器人手臂包含四個(gè)金屬齒輪舵機(jī)和3D打印的結(jié)構(gòu)部件。








評(píng)論