EEPW首頁(yè) >>
主題列表 >>
機(jī)械臂
機(jī)械臂 文章 最新資訊
自制“鋼鐵俠機(jī)械臂”遠(yuǎn)程縫合葡萄皮,成本不到1萬(wàn)元
- 引言當(dāng)稚暉君在廁所里用手機(jī)操控機(jī)械臂給葡萄縫針的視頻刷屏?xí)r,無(wú)數(shù)網(wǎng)友感嘆:“這就是科技與狠活!”這臺(tái)名為Dummy的機(jī)械臂,不僅能遠(yuǎn)程完成微米級(jí)精度的縫合手術(shù),還搭載AR操控、力反饋夾爪等黑科技,成本卻不到1萬(wàn)元。作為華為“天才少年”的又一力作,它再次印證了極客精神如何用代碼和算法重新定義可能性。一、硬核技術(shù):從“工業(yè)心臟”到“AI小腦”的全面突破1. 機(jī)械結(jié)構(gòu):精度直追達(dá)芬奇手術(shù)機(jī)器人諧波減速器+步進(jìn)電機(jī):采用零背隙諧波減速器,搭配6個(gè)高精度步進(jìn)電機(jī),末端重復(fù)精度達(dá)0.02毫米,媲美工業(yè)級(jí)機(jī)械臂;鋁CN
- 關(guān)鍵字: 機(jī)械臂
自動(dòng)廢料收集機(jī)器人
- 這個(gè)簡(jiǎn)短教程的目的是展示一種獨(dú)特的爬墻方法,并展示1自由度機(jī)械臂的雙重功能(不包括夾具)技術(shù)上是3自由度,因?yàn)橐苿?dòng)/旋轉(zhuǎn)機(jī)器人框架。規(guī)則基本上是這樣的:收集和檢索未知大小/重量的對(duì)象電池電量嚴(yán)重受限機(jī)器人可以遠(yuǎn)程控制允許的機(jī)器人高度/長(zhǎng)度/寬度限制規(guī)格該機(jī)器人使用一個(gè)HS-311伺服機(jī)構(gòu)用于致動(dòng)儲(chǔ)料斗,一個(gè)改進(jìn)的HS-805BB用于1自由度機(jī)械臂,一個(gè)伺服機(jī)構(gòu)用于機(jī)器人夾持器末端執(zhí)行器,以及兩個(gè)改進(jìn)的伺服機(jī)構(gòu)用于差速傳動(dòng)系。鏟斗由彎曲的鋁片金屬制成,框架由鋁原材料銑削和CNCe制成。桶內(nèi)使用了特殊形狀的泡
- 關(guān)鍵字: 爬壁機(jī)器人 機(jī)械臂
使用Arduino的避障機(jī)器人(智能車)

- 這里設(shè)計(jì)了一個(gè)關(guān)于避障機(jī)器人的簡(jiǎn)單項(xiàng)目。機(jī)器人學(xué)是一個(gè)有趣且快速發(fā)展的領(lǐng)域。作為工程的一個(gè)分支,機(jī)器人技術(shù)的應(yīng)用隨著技術(shù)的進(jìn)步而不斷增加。移動(dòng)機(jī)器人的概念正在快速發(fā)展,移動(dòng)機(jī)器人的數(shù)量和其復(fù)雜性隨著不同的應(yīng)用而增加。有許多類型的移動(dòng)機(jī)器人導(dǎo)航技術(shù),如路徑規(guī)劃、自我定位和地圖解釋。避障機(jī)器人是一種自主移動(dòng)機(jī)器人,它可以避免與意外的障礙物發(fā)生碰撞。在這個(gè)項(xiàng)目中,我們?cè)O(shè)計(jì)了一個(gè)避障機(jī)器人。它是一個(gè)基于Arduino的機(jī)器人,使用超聲波測(cè)距儀傳感器來(lái)避免碰撞。電路圖需要的硬件Arduino Uno超聲波測(cè)距儀傳感
- 關(guān)鍵字: DIY Arduino 避障 機(jī)器人 機(jī)械臂
基于STM32的智能物流機(jī)器人

- 設(shè)計(jì)了以STM32F103C8T6芯片為主控的智能物流機(jī)器人,并對(duì)機(jī)器人系統(tǒng)性能進(jìn)行分析。電機(jī)調(diào)速動(dòng)態(tài)指標(biāo)中調(diào)節(jié)時(shí)間平均為560 ms,超調(diào)量平均34.6%。隨著電機(jī)轉(zhuǎn)速增大,調(diào)節(jié)時(shí)間呈減小趨勢(shì)。機(jī)械臂跟蹤性能在PID控制下表現(xiàn)良好,平均每2.5 s完成跟蹤目標(biāo)并準(zhǔn)確抓取,實(shí)物系統(tǒng)有良好的穩(wěn)定性、可靠性和準(zhǔn)確性。
- 關(guān)鍵字: 202304 STM32 OpenMV PID 機(jī)械臂 物流機(jī)器人
使用Arduino的手勢(shì)控制機(jī)器人

- 在這個(gè)項(xiàng)目中,我們使用Arduino設(shè)計(jì)了一個(gè)簡(jiǎn)單的手勢(shì)控制的機(jī)器人。這個(gè)手勢(shì)控制機(jī)器人是基于Arduino Nano、MPU6050、射頻發(fā)射器-接收器對(duì)和L293D電機(jī)驅(qū)動(dòng)器。盡管標(biāo)題說(shuō)是手勢(shì)控制機(jī)器人,但從技術(shù)上講,這個(gè)機(jī)器人是由手的傾斜度控制的。前言機(jī)器人是一個(gè)由計(jì)算機(jī)程序操作的電子機(jī)械系統(tǒng)。機(jī)器人可以是自主的或半自主的。自主的機(jī)器人不受人類的控制,通過(guò)對(duì)環(huán)境的感知來(lái)決定自己的行為。大多數(shù)工業(yè)機(jī)器人是自主的,因?yàn)樗鼈冃枰愿咚俸透呔_度進(jìn)行操作。但有些應(yīng)用需要半自主或人類控制的機(jī)器人。一些最常用的
- 關(guān)鍵字: DIY Arduino 射頻 電機(jī)驅(qū)動(dòng) 機(jī)器人 機(jī)械臂
DIY Arduino和藍(lán)牙控制機(jī)器人手臂項(xiàng)目

- 在這個(gè)項(xiàng)目中,我將向你展示如何使用Android手機(jī)建立一個(gè)Arduino和藍(lán)牙控制的機(jī)器人手臂。這個(gè)機(jī)械臂既可以在手動(dòng)模式下操作,也可以在全自動(dòng)模式下編程操作。你們已經(jīng)在Electronics Hub看到了一個(gè)機(jī)械臂項(xiàng)目,我們從廢品中獲得了一切(除了電機(jī)和Arduino)。我們從你們那里得到了非常好的反應(yīng),在此基礎(chǔ)上,我們決定做一個(gè)更好的版本,如果我必須說(shuō),是2.0版。這個(gè)DIY Arduino和藍(lán)牙機(jī)器人手臂項(xiàng)目是通過(guò)藍(lán)牙通信的安卓手機(jī)操作的。我們已經(jīng)為安卓手機(jī)開(kāi)發(fā)了一個(gè)應(yīng)用程序,你可以用它來(lái)控制機(jī)械
- 關(guān)鍵字: DIY Arduino 藍(lán)牙 機(jī)器人 機(jī)械臂
中國(guó)空間站機(jī)械臂有多牛?承載25噸 可單手抓飛船
- 航天員聶海勝、劉伯明和湯洪波先后進(jìn)入天和核心艙,標(biāo)志著中國(guó)人首次進(jìn)入自己的空間站。 “天和”核心艙由生活控制艙、資源艙、節(jié)點(diǎn)艙三個(gè)部分構(gòu)成,在太空為宇航員和科學(xué)家提供居住和科研環(huán)境。 引人矚目的是,“天和”核心艙外的一對(duì)大型機(jī)械臂,為我國(guó)首個(gè)具有七個(gè)自由度的機(jī)械臂,從而在太空可以實(shí)現(xiàn)類似人類手臂的運(yùn)動(dòng)能力。 七個(gè)自由度意味著什么?21所專家說(shuō),這是對(duì)人類手臂的最真實(shí)還原,是我國(guó)目前智能程度最高、難度最大、系統(tǒng)最復(fù)雜的空間智能制造系統(tǒng),最大承載能力25噸。 核心艙機(jī)械臂通過(guò)末端執(zhí)行器與目標(biāo)適配器
- 關(guān)鍵字: 機(jī)械臂 中國(guó)空間站
六足仿生機(jī)器人原理解析及實(shí)物設(shè)計(jì),包含軟硬件設(shè)計(jì)
- 本設(shè)計(jì)通過(guò)以MIPS構(gòu)架的PIC32單片機(jī)實(shí)現(xiàn)對(duì)仿生六足機(jī)器人基本步態(tài)控制,使機(jī)器人可按照典型步態(tài)協(xié)調(diào)靈活運(yùn)動(dòng)。該六足機(jī)器人前進(jìn)一步的最大距離是8CM 。一次拐彎的最大角度為30度。機(jī)械臂夾起來(lái)的重物最重為150g左右。無(wú)線攝像頭數(shù)據(jù)傳輸?shù)淖钸h(yuǎn)距離達(dá)到200米以上。
- 關(guān)鍵字: 六足仿生機(jī)器人 MIPS構(gòu)架 PIC單片機(jī) 無(wú)線控制 機(jī)械臂
輕松DIY擊鼓機(jī)器人,提供詳細(xì)軟硬件設(shè)計(jì)參數(shù)和系統(tǒng) 解決方案
- 本機(jī)器人取名為大白菜,是一個(gè)具有5個(gè)自由度的機(jī)器人,其中3個(gè)有電機(jī)拖動(dòng),能夠?qū)崿F(xiàn)擊鼓的功能。機(jī)械臂本體由鋁合金制作,底座由有機(jī)玻璃制作,控制電路分為主控制電路與子控制電路,主控制電路為單片機(jī)開(kāi)發(fā)板PIC及其配套系統(tǒng),子控制電路為聲音與觸感示教系統(tǒng)。機(jī)器人由整體電路及PIC控制,通過(guò)離線編程設(shè)計(jì)可以根據(jù)預(yù)先設(shè)定的程序擊鼓,通過(guò)示教系統(tǒng)設(shè)計(jì)可
- 關(guān)鍵字: 擊鼓機(jī)器人 機(jī)械臂 聲音傳感器 觸碰開(kāi)關(guān) PIC
2012年重大科研成就:思想可直接控制機(jī)械臂
- 北京時(shí)間1月2日早間消息,據(jù)美國(guó)探索頻道28日?qǐng)?bào)道,1945年,亞瑟-克拉克在《無(wú)線電世界》雜志發(fā)表了一篇具有歷史意義的文章,詳細(xì)闡述當(dāng)前所有人都在使用的地球同步通訊衛(wèi)星。這種衛(wèi)星被他稱之為“克拉克軌道”。在科幻小說(shuō)中,艾薩克-阿西莫夫曾多次刻畫類人機(jī)器人。現(xiàn)在,這種機(jī)器人在先進(jìn)實(shí)驗(yàn)室已經(jīng)非常普遍。克拉克和阿西莫夫的例子無(wú)疑是在告訴我們,隨著科學(xué)技術(shù)的進(jìn)步,很多一度被認(rèn)為科幻的東西最終都成為現(xiàn)實(shí)。以下盤點(diǎn)的是科學(xué)家在2012年取得的一系列重大科研成就。 1.仿生假肢
- 關(guān)鍵字: 無(wú)線電 機(jī)械臂
基于嵌入式系統(tǒng)和CAN總線的檢修機(jī)械臂控制系統(tǒng)
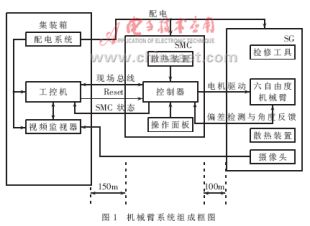
- 蒸汽發(fā)生器(Steam Generator)是核動(dòng)力裝置中一、二回路之間的連接樞紐,也是核動(dòng)力裝置運(yùn)行中發(fā)生故障最多的設(shè)備之一。蒸汽發(fā)生器的故障大多是由于各種腐蝕使傳熱管或管與管板接頭處發(fā)生泄漏,從而影響動(dòng)力裝置的安全運(yùn)行。由于蒸汽發(fā)生器中存在放射性物質(zhì),當(dāng)發(fā)生泄漏時(shí),人不能進(jìn)入其中進(jìn)行維修,這時(shí)就需要機(jī)械臂代替人完成維修工作。機(jī)械臂檢修系統(tǒng)即通過(guò)六自由度機(jī)械臂對(duì)蒸汽發(fā)生器內(nèi)部進(jìn)行檢修和維護(hù)。該機(jī)械臂有六個(gè)關(guān)節(jié),六軸聯(lián)動(dòng);主要用于蒸汽發(fā)生器(SG)一回路側(cè)檢修活動(dòng)。機(jī)械臂的手端裝有適配器,可以攜掛不同
- 關(guān)鍵字: 工控機(jī) 機(jī)械臂 蒸汽發(fā)生器 監(jiān)控
| 共11條 1/1 1 |
機(jī)械臂介紹
您好,目前還沒(méi)有人創(chuàng)建詞條機(jī)械臂!
歡迎您創(chuàng)建該詞條,闡述對(duì)機(jī)械臂的理解,并與今后在此搜索機(jī)械臂的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對(duì)機(jī)械臂的理解,并與今后在此搜索機(jī)械臂的朋友們分享。 創(chuàng)建詞條
機(jī)械臂相關(guān)帖子
機(jī)械臂資料下載
機(jī)械臂專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會(huì)員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司
 京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司