基于國(guó)產(chǎn)ARM核MCU的液冷智能控制系統(tǒng)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
摘要:該智能液冷控制系統(tǒng)軟硬件采用模塊化設(shè)計(jì),結(jié)構(gòu)簡(jiǎn)單、抗干擾能力強(qiáng)、工作穩(wěn)定、成本較低、控制靈活、實(shí)用性強(qiáng),可廣泛應(yīng)用于大功率元器件的散熱。
本文引用地址:http://www.104case.com/article/202210/439442.htm1 引言
液冷系統(tǒng)的控制是一個(gè)非常典型的機(jī)電一體控制系統(tǒng)。它不僅需要水泵、風(fēng)機(jī)作為執(zhí)行元件,更需要MCU的控制單元。隨著電子技術(shù)以及無(wú)刷電機(jī)控制理論發(fā)展的成熟,無(wú)位置無(wú)刷直流電機(jī)的應(yīng)用得到普及,它具有體積小、結(jié)構(gòu)簡(jiǎn)單、適應(yīng)惡劣環(huán)境、維護(hù)方便、便于智能控制等系列優(yōu)點(diǎn),在水泵領(lǐng)域得到廣泛的應(yīng)用。液冷智能系統(tǒng)控制采用國(guó)產(chǎn)32位ARM核MCU,以GD32F450為核心讀取液冷溫度,根據(jù)溫度的變化為依據(jù),水泵流量、風(fēng)機(jī)轉(zhuǎn)速,通過(guò)串口傳送液冷數(shù)據(jù),如水泵轉(zhuǎn)速、風(fēng)機(jī)轉(zhuǎn)速、液冷溫度、液冷液位高度等,實(shí)現(xiàn)液冷智能自動(dòng)控制,如圖1 所示。

圖1 液冷系統(tǒng)控制框圖
2 無(wú)位置傳感器無(wú)刷直流電機(jī)水泵的驅(qū)動(dòng)策略
本設(shè)計(jì)的水泵使用無(wú)位置無(wú)刷水泵,驅(qū)動(dòng)控制采用8 位的STC系列國(guó)產(chǎn)單片機(jī)為核心,利用反電勢(shì)法設(shè)計(jì)了一種無(wú)位置傳感器無(wú)刷水泵驅(qū)動(dòng)控制器。利用MOSFET 作為開(kāi)關(guān)器件,給出了全橋式逆變電路和位置檢測(cè)電路的原理圖。
2.1 采用反電勢(shì)法無(wú)位置傳感器無(wú)刷直流電機(jī)驅(qū)動(dòng)策略
無(wú)位置傳感器無(wú)刷直流電機(jī)是如何驅(qū)動(dòng)與控制的呢?通常,無(wú)刷電機(jī)都要使用位置傳感器來(lái)檢測(cè)無(wú)刷電機(jī)轉(zhuǎn)子的位置來(lái)進(jìn)行驅(qū)動(dòng)和控制,但位置傳感器有一些缺點(diǎn),比如:增加成本、增加無(wú)刷電機(jī)體積、易出故障、易遭受干擾、不能適應(yīng)惡劣環(huán)境等。因此,反電勢(shì)法孕育而生,其優(yōu)點(diǎn)是:降低無(wú)刷電機(jī)成本、減少無(wú)刷電機(jī)體積、減少故障、適應(yīng)惡劣環(huán)境、可靠性提高等。反電勢(shì)法的工作原理是通過(guò)檢測(cè)無(wú)刷電機(jī)的不導(dǎo)通繞組的反電動(dòng)勢(shì)來(lái)找到反電動(dòng)勢(shì)的過(guò)零點(diǎn),再延遲30° 電角度進(jìn)行換相。如圖2 所示,A 相繞組的反電勢(shì)在一個(gè)電周期內(nèi)的波形,其中橫軸代表當(dāng)前運(yùn)行時(shí)刻的電角度,縱軸代表A 相繞組產(chǎn)生的反電勢(shì)Ea。從圖中可以看出,當(dāng)檢測(cè)到反電勢(shì)信號(hào)過(guò)零點(diǎn)Z4 后,再延遲30° 電角度即是換相點(diǎn)[1]。對(duì)于三相繞組電機(jī),每隔60° 電角度就會(huì)產(chǎn)生一個(gè)反電勢(shì)過(guò)零點(diǎn),過(guò)零點(diǎn)信號(hào)被STC15W408AS微控制器檢測(cè)并處理。

圖2 反電動(dòng)勢(shì)過(guò)零點(diǎn)延時(shí)30°換相原理圖
2.2 無(wú)位置傳感器無(wú)刷直流電機(jī)水泵的驅(qū)動(dòng)電路設(shè)計(jì)
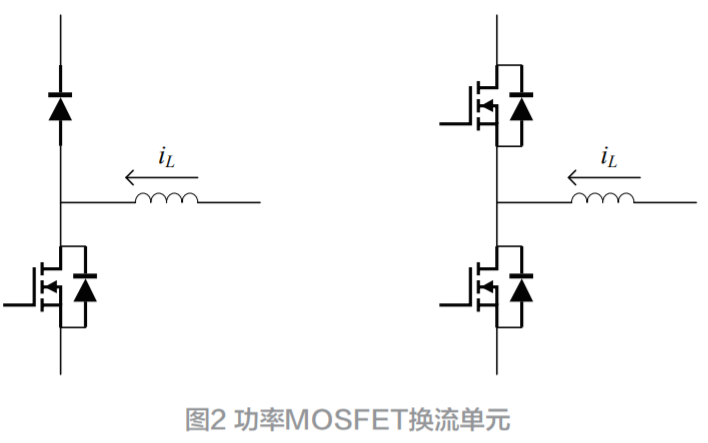
在本電路的驅(qū)動(dòng)電路設(shè)計(jì)中,電路上橋臂采用MOSFET P管,下橋臂使用MOSFET N管,與電機(jī)繞組連接電路簡(jiǎn)單。此電路的設(shè)計(jì)采用了MOSFET P管和MOSFET N管,簡(jiǎn)化了電路,節(jié)省了電壓泵即自舉電路,降低了成本,縮小了空間,提高了可靠性[4],如圖3。

圖3 無(wú)刷電機(jī)驅(qū)動(dòng)電路
2.3 無(wú)位置傳感器無(wú)刷直流電機(jī)水泵的單片機(jī)控制電路設(shè)計(jì)
在電路的設(shè)計(jì)中采用8位的STC15W408AS 系列國(guó)產(chǎn)單片機(jī)為核心,檢測(cè)反電勢(shì)過(guò)零信號(hào)判斷轉(zhuǎn)子位置,對(duì)無(wú)刷電機(jī)驅(qū)動(dòng)電路進(jìn)行有效地控制,電路原理圖如圖4。

反電動(dòng)勢(shì)信號(hào)經(jīng)過(guò)由比較器LM339組成的檢測(cè)電路,檢測(cè)出反電動(dòng)勢(shì)過(guò)零信號(hào)給單片機(jī)STC15W408AS, 提供無(wú)刷直流電機(jī)水泵的轉(zhuǎn)子位置信號(hào),從而實(shí)現(xiàn)控制無(wú)位置傳感器無(wú)刷直流電機(jī)水泵的驅(qū)動(dòng)電路進(jìn)行正確地?fù)Q相,驅(qū)動(dòng)無(wú)位置傳感器無(wú)刷直流電機(jī)水泵正常運(yùn)轉(zhuǎn)。
2.4 無(wú)位置傳感器無(wú)刷直流電機(jī)水泵的單片機(jī)控制程序的設(shè)計(jì)
水泵的系統(tǒng)主程序流程如圖5 所示。水泵在停止的時(shí)候,無(wú)刷電機(jī)的轉(zhuǎn)子處于位置不確定的停止?fàn)顟B(tài),此時(shí)檢測(cè)不到反電勢(shì)信號(hào),因此需要先確定轉(zhuǎn)子的位置,讓轉(zhuǎn)子先轉(zhuǎn)起來(lái);采用開(kāi)環(huán)強(qiáng)制換相并加速直到可以檢測(cè)到反電動(dòng)勢(shì)的時(shí)候再讀取反電動(dòng)勢(shì)信號(hào),采用擇多函數(shù)處理,防止干擾信號(hào)[6]。在讀取到反電動(dòng)勢(shì)過(guò)零點(diǎn)后計(jì)算換相延時(shí)30°電角度,利用定時(shí)器延時(shí),延時(shí)到30°電角度后換相進(jìn)入新的循環(huán)過(guò)程。在正常運(yùn)行的同時(shí)接收ARM核MCU的調(diào)速控制信息。

圖5 控制框圖
3 液冷的系統(tǒng)控制
液冷系統(tǒng)在運(yùn)行的過(guò)程中由國(guó)產(chǎn)32 位ARM 核MCU GD32F450為核心讀取液冷溫度,根據(jù)溫度的變化調(diào)節(jié)水泵流量、風(fēng)機(jī)轉(zhuǎn)速,通過(guò)串口傳送液冷數(shù)據(jù),如水泵轉(zhuǎn)速、風(fēng)機(jī)轉(zhuǎn)速、液冷溫度、液冷液位高度等,實(shí)現(xiàn)液冷智能自動(dòng)控制。
軟件設(shè)計(jì)主控制程序流程圖如圖6 所示,首先進(jìn)行初始化程序,初始化程序設(shè)計(jì)主要是完成GD32F450的GPIO配置、定時(shí)器配置、串口設(shè)置、PWM設(shè)置、QT18B20溫度讀取設(shè)置、中斷服務(wù)配置等。系統(tǒng)的重要功能是通過(guò)GD32F450讀取溫度、設(shè)置風(fēng)機(jī)PWM、設(shè)置水泵轉(zhuǎn)速,上報(bào)系統(tǒng)溫度、風(fēng)機(jī)轉(zhuǎn)速、水泵轉(zhuǎn)速、液位等信息,實(shí)現(xiàn)系統(tǒng)智能的控制。

圖6 液冷系統(tǒng)控制框圖
4 實(shí)驗(yàn)結(jié)果與分析
在圖7 中顯示了8 個(gè)加熱模塊的溫度,每個(gè)模塊450 W的熱耗功率,一共為3 650 W的熱耗功率,8 個(gè)發(fā)熱模塊均勻分布在41 mm×340mm的冷板上。在環(huán)境溫度為17 ℃的情況下,開(kāi)啟液冷系統(tǒng),熱耗功率3 650W,通過(guò)液冷系統(tǒng)的冷板吸收熱量,再通過(guò)換熱器釋放熱量。冷板里的乙二醇溶液由水泵打入,再流到換熱器里經(jīng)過(guò)換熱器由風(fēng)機(jī)把熱量釋放出來(lái)。測(cè)試結(jié)果表明,發(fā)熱功率在3 650W、環(huán)境溫度17℃ 的情況下,熱平衡時(shí)的溫升是28℃。結(jié)果表明液冷智能控制系統(tǒng)滿(mǎn)足了液冷的散熱要求,表1中為測(cè)試結(jié)果。

(a)初始溫度

(b)熱平衡下的溫度
圖7 液冷系統(tǒng)溫升情況

結(jié)論:本實(shí)驗(yàn)中熱耗功率加至3 650 W 時(shí),最高溫升至28 ℃ 左右,從實(shí)驗(yàn)結(jié)果來(lái)看,能夠滿(mǎn)足(具體發(fā)熱量3 650 W)3 kw 功放單元滿(mǎn)功率負(fù)荷30 分鐘以上情況,功放模塊的溫升控制在35 ℃ 以下”。
5 結(jié)語(yǔ)
本文的無(wú)位置傳感器無(wú)刷直流電機(jī)水泵以8位的STC15W408AS 系列國(guó)產(chǎn)單片機(jī)為核心,實(shí)現(xiàn)了無(wú)位置傳感器無(wú)刷直流電機(jī)控制,采用擇多函數(shù)濾波實(shí)現(xiàn)反電動(dòng)勢(shì)過(guò)零點(diǎn)檢測(cè)方式,能快速準(zhǔn)確地檢測(cè)轉(zhuǎn)子位置信息,具有良好的性能。而液冷智能系統(tǒng)控制部分采用國(guó)產(chǎn)32 位ARM核MCU,以GD32F450 為控制核心,讀取溫度信息,對(duì)水泵、風(fēng)機(jī)進(jìn)行智能調(diào)控,實(shí)現(xiàn)了合理的智能控制。
參考文獻(xiàn):
[1] 李自成,秦憶.無(wú)刷直流電機(jī)無(wú)位置傳感器控制關(guān)鍵技術(shù)研究[D].武漢:華中科技大學(xué),2010.
[2] 吳紅星,葉宇驕,倪天,等.無(wú)刷直流電機(jī)轉(zhuǎn)子位置檢測(cè)技術(shù)綜述[J].微電機(jī),2011,44(8):75-76.
[3] 廖承喜,朱志杰,翁微.無(wú)刷直流電機(jī)三段式自起動(dòng)關(guān)鍵技術(shù)研究[J].電力電子技術(shù)2008,42(5):61-62.
[4] 游志宇.基于場(chǎng)效應(yīng)管的直流電機(jī)驅(qū)動(dòng)控制電路設(shè)計(jì)[J].國(guó)外電子元器件,2008(2):3-4.
[5] 榮軍,等.不同PWM調(diào)制方式對(duì)無(wú)刷直流電機(jī)調(diào)速的影響[J].微電機(jī),2015,48(10):70-74.
[6] 董安邦,李國(guó)麗,漆星,等.基于改進(jìn)擇多濾波無(wú)刷直流電機(jī)控制系統(tǒng)的研究[J].電氣傳動(dòng),2017,47(4).
(本文來(lái)源于《電子產(chǎn)品世界》雜志社2022年10月期)

評(píng)論