基于驅動LED串的DCM升壓轉換器的詳細理論分析


等式(21)中計算的額外電阻R1的值計算如下:

當R1與Rac并聯時,參照等式(23),就變成:

我們現在可以計算靜態增益H0:

推導出的極點和零點如下:
可以運行SPICE仿真來檢驗此偏置點的有效性。我們推導出的大信號自動觸發電流模型。電路圖及反射的偏置點如圖8所示。在此電路圖中,為了獲得正確的動態阻抗的工作電壓,我們使用簡單的分流穩壓器模仿完美齊納二極管的工作。這完美二極管提供22 V的擊穿電壓VZ,其動態阻抗為55 Ω。應當注意的是,簡單的22 V直流源就能用于交流分析,但在諸如啟動等任何瞬態仿真條件下就不適用。當運行交流掃描分時 ,SPICE將工作點周圍的電路線性化,并產生小信號模型。電路圖中顯示的結果跟我們根據解析分析獲得的結果相距不遠。控制電壓為0.4 V條件下感測電阻電流到達 ,接近于等式(33)中計算出的值。
受控系統波特圖如圖9所示。直接增益接近于等式(37)的計算結果,極點位于恰當位置(1.6 kHz)。相位持續下降是因為高頻RHPZ位于高頻率。我們的簡化方法無法預測這RHPZ的存在。它存在與否跟拓撲結構的布設有關:升壓轉換器在導通時間期間先在電感中存儲電源能量,并在關閉期間將其泄放給負載。任何負載變化,如輸出電流增加,必須首先通過電感躍升,然后再提供給輸出。這種工作模式固有的延遲通過RHPZ來建模。這能量傳輸延遲并不會明顯地出現在等式(16)中,因為該等式簡單地電流與控制電壓Vc之間的關系。但在DCM條件下,等式(38)中定義的左半平面零點(LHPZ)在顯著高于工作頻率Fsw的頻率時出現。
應當注意的是,我們在實際對LED電流進行穩流的時候分析了輸出電壓。在我們觀測感測電阻Rsense兩端的電壓時,反饋信號是Vout按由rLEDs和Rsense構成的分壓比例向下調節。比例調整就變為:

這個曲線也表征在圖8中。
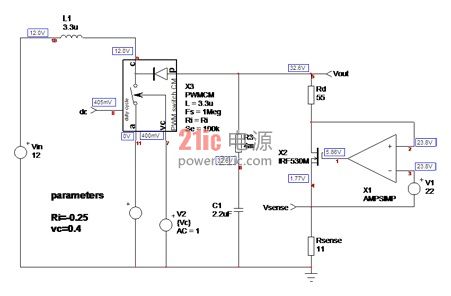
圖8:平均模型幫助驗證工作偏置點及交流響應。
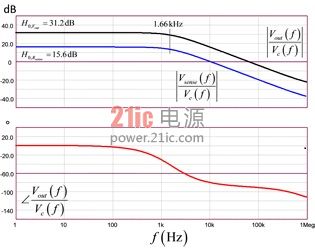
圖9:波特圖確認了直流增益及極點位置。
結論
這第1部分的文章介紹如何推導驅動LED串的升壓轉換器的小信號響應。本文沒有應用DCM升壓轉換器的完整小信號模型,而是推導簡單的等式,描述采用不連續導電模式工作的LED升壓轉換器的一階響應。盡管存在一階的固有局限,簡要分析獲得的答案是足以穩定控制環路。在第2部分(實際考慮因素)文章中,我們將深入研究實施方案,并驗證經驗結果及與理論推導比較。







評論