為什么今天的L4無人駕駛無法達到終局?

很多場合,“智能駕駛”和“無人駕駛”被混為一談,而后者顯然更為大眾所喜聞樂見。更加專業的群眾,愿意用“L4”、“L5”來說事。“L5”的車就像變形金剛汽車人,降落到世界任何一個地方,馬上能熟練地匯入滾滾車流,這顯然仍是遙遠的傳奇。于是“L4”成了圈子里所有人的寄托。當然,每個圈子里都有所謂的鄙視鏈,比如這個圈子里:
本文引用地址:http://www.104case.com/article/201806/381800.htmL4的看不起L3,殊不知L3的極限能力與L4相差無幾,從L3出現意外狀況、到駕駛員接管前的10幾秒,需要無人狀態的fail operation(比如減速靠邊、停到安全區域),這種能力已經非常接近L4。
在大馬路上練的L4,看不起各種特殊場景的L4。這里也有幾個誤解:
第一,如果跑來跑去只在幾條大馬路上,那幾條大馬路也與“限定場景”無異(機器學習里叫overfit)。你馬上挑出幾條新的馬路來,估計谷歌Waymo也夠嗆。
第二,很多特殊場景也是開放環境。比如大商場的停車場有社會車輛、出沒不定的行人和擁擠的十字路口,與大馬路相比,主體算法的難度是類似的,差別只是在于訓練數據和反應速度(這又取決于傳感器的工作距離、分辨率和計算芯片的處理速度)。
第三,很多特殊場景是需要A照司機的,這些場景需要“C照馬路小白”所不具備的駕駛技巧。
第四,很多人看好的大馬路L4,卻是在3、5年內很難真正無人駕駛的(需要坐安全測試員),而很多特殊場景的L4,卻是在1、2年內可以商業化的。
更要命的是,今天的L4算法(包括大馬路和特殊場景),很可能都無法到達終局。換言之,滿城盡跑無人車時,他們大概率是不同的物種,跑不同的人工智能算法。
最后一點似乎是故作驚人之語,這里不妨科學論證一下。
且看這張圖。
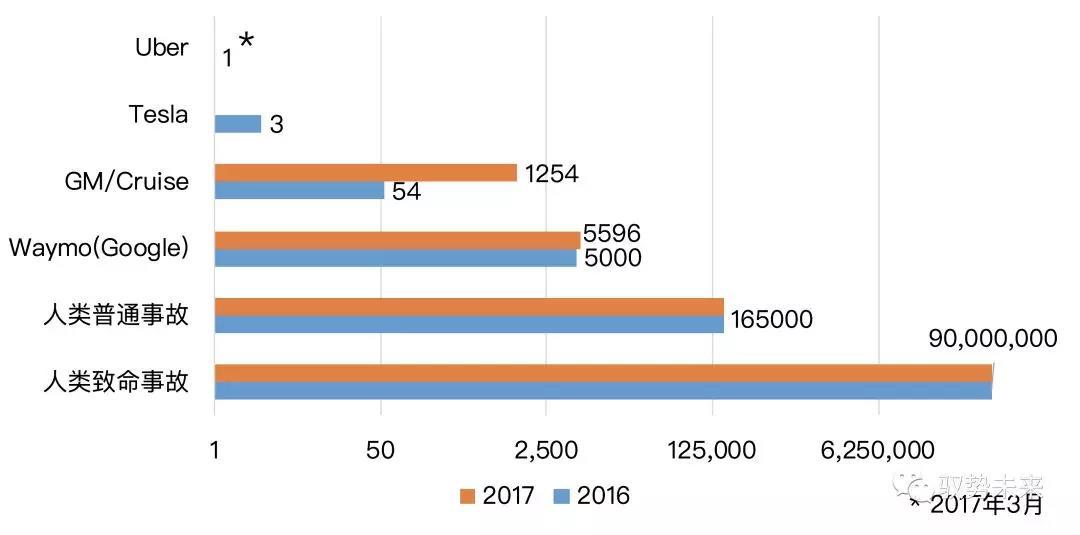
圖中X軸是需要干預或出現事故的平均里程數。Waymo在2017年的水平是每自動駕駛5596英里(9006公里)才有1次人的干預,遙遙領先于其他選手。然而再推敲下去,細思極恐。
第一,Waymo的水平離美國人類駕駛員的平均水平,差距巨大。后者是每16.5萬英里出一次普通事故,每9000萬英里才出一次致命事故。這個數據是基于加州城郊公路的30多萬英里,交通場景總體不算特別難。
第二,Waymo的提升速度在減緩。其2015年的水準是1300英里一次干預,到2016年提升了近3倍,但2017年相較去年只提升了10%出頭。再看月度的數據,2017年除了年底出現了令人驚異的增長,其他月度還是起伏不定。年底出現躍升,前年也有過,也許跟假期車少有關?無論怎樣,2018年是否能有顯著增長,還不好說。

第三,Waymo的算法(以及今天幾乎所有L4的算法)都是數據驅動的,見過的大概率會,沒見過的大概率不會,所以Waymo領先主要是領先在數據積累,去年底的時候已經有640萬公里的實測數據。然而,對Waymo來說,通過路測方法收集數據已經變得異常昂貴:2017年的63次干預中大致有2/3是因為算法問題,而針對每個問題,要花1萬多公里的油費和測試駕駛員人工費用,才能獲得1個高價值數據。



評論