仿人足球機(jī)器人目標(biāo)定位技術(shù)與追蹤算法改進(jìn)

對(duì)于仿人足球機(jī)器人來(lái)說(shuō),視覺(jué)功能是極其重要的。在足球機(jī)器人的各種關(guān)鍵技術(shù)中,機(jī)器視覺(jué)是應(yīng)用范圍最廣,最為基本的技術(shù)之一。移動(dòng)機(jī)器人視覺(jué)的研究主要集中在顏色模型建立、目標(biāo)識(shí)別、定位以及跟蹤等方面。仿人機(jī)器人視覺(jué)系統(tǒng)的識(shí)別與定位算法也是目前的研究熱點(diǎn),目標(biāo)的實(shí)時(shí)識(shí)別與定位是足球機(jī)器人在足球賽中精確踢球的前提。文章主要是針對(duì)目前足球機(jī)器人在視覺(jué)系統(tǒng)上所存在的問(wèn)題進(jìn)行了顏色模型建立及目標(biāo)定位算法的改進(jìn),加入了目標(biāo)追蹤算法,確保目標(biāo)識(shí)別與定位的準(zhǔn)確。在iKid足球機(jī)器人上進(jìn)行試驗(yàn)并調(diào)試,試驗(yàn)結(jié)果具有較好的實(shí)時(shí)性和準(zhǔn)確性。
本文引用地址:http://www.104case.com/article/201710/367867.htm引言
在RoboCup仿人足球機(jī)器人比賽中,視覺(jué)是其獲得外界信息的主要途徑,機(jī)器人通過(guò)攝像頭去采集周圍環(huán)境的圖像信息,進(jìn)而對(duì)環(huán)境進(jìn)行認(rèn)知,對(duì)目標(biāo)進(jìn)行識(shí)別。在機(jī)器人足球比賽中,球場(chǎng)中的信息包括藍(lán)色和黃色的球門、角球柱、橙色的球等,足球機(jī)器人需要對(duì)其所獲取到的信息進(jìn)行識(shí)別及判斷進(jìn)而做出相應(yīng)的決策,因此仿人足球機(jī)器人識(shí)別的準(zhǔn)確性和實(shí)時(shí)性對(duì)于比賽的結(jié)果來(lái)說(shuō)是至關(guān)重要的。本次創(chuàng)新項(xiàng)目研究主要是基于iKid機(jī)器人的視覺(jué)系統(tǒng)。
根據(jù)場(chǎng)地調(diào)試經(jīng)驗(yàn)發(fā)現(xiàn)機(jī)器人視覺(jué)模型及定位追蹤算法中存在以下不足:1)當(dāng)周圍環(huán)境有稍微變化或者環(huán)境中有與目標(biāo)物體顏色相接近的物體時(shí),對(duì)目標(biāo)識(shí)別標(biāo)定結(jié)果有很大的影響;2)由RGB到HSV的轉(zhuǎn)換影響系統(tǒng)的實(shí)時(shí)性;3)目前足球機(jī)器人的定位是利用坐標(biāo)之間的變換及三角形成像規(guī)律算法,調(diào)試中發(fā)現(xiàn)這種定位算法在精度上存在很大問(wèn)題;4)當(dāng)機(jī)器人距離目標(biāo)物體較遠(yuǎn)時(shí),對(duì)目標(biāo)定位不準(zhǔn)確,定位誤差較大。
針對(duì)于以上問(wèn)題,本次項(xiàng)目中,本文提出改進(jìn)原有機(jī)器人的視覺(jué)模型、目標(biāo)定位算法等,并加入追蹤算法,使iKid機(jī)器人視覺(jué)系統(tǒng)更加準(zhǔn)確高效。
1 機(jī)器人系統(tǒng)結(jié)構(gòu)
此項(xiàng)目研究的平臺(tái)是iKid仿人足球機(jī)器人。iKid機(jī)器人共有20個(gè)自由度,頭部有仰俯和搖擺兩個(gè)自由度,腿部有6個(gè)自由度,手臂處分別有3個(gè)自由度。其頭部采用的是USB網(wǎng)絡(luò)攝像頭Logitech C905,核心板型號(hào)為Cortex-A8,所選用的舵機(jī)型號(hào)為韓國(guó)Robots公司的RX28和RX64。
在智能決策系統(tǒng)硬件方面,iKid機(jī)器人采用Cortex-A8核心板,其主處理器為Samsung S5PV210。此外,S5PV210內(nèi)部集成了高性能圖形引擎,同時(shí)也包含了圖像硬解碼功能,能夠流暢運(yùn)行Android、Linux等操作系統(tǒng)。
iKid仿人足球機(jī)器人的圖像采集器選擇的是USB2.0網(wǎng)絡(luò)攝像頭Logitech C905,它能夠以30幀/秒的速度傳送分辨率為640×480的壓縮圖像,攝像頭的采集頻率可達(dá)人眼的頻率,且能在當(dāng)前比賽場(chǎng)地的坐標(biāo)位置看到場(chǎng)地任意位置的目標(biāo)。攝像機(jī)還具備可變白平衡、可變?cè)鲆娴茸詣?dòng)調(diào)節(jié)功能,能夠使機(jī)器人在不同的光照情況下保持良好的圖像質(zhì)量。該攝像頭支持RGB和YUYV格式的圖像,支持多分辨率。
在iKid機(jī)器人決策方面,采用的是運(yùn)動(dòng)控制系統(tǒng)與智能決策系統(tǒng)分離的分布式系統(tǒng),經(jīng)Wi-Fi傳送的信息及攝像機(jī)采集到的圖像信息處理后使機(jī)器人做出相應(yīng)的決策,控制舵機(jī)做出相應(yīng)的運(yùn)動(dòng),使機(jī)器人做出相應(yīng)的運(yùn)動(dòng)。
具體系統(tǒng)簡(jiǎn)圖如圖2所示。
圖2 iKid仿人足球機(jī)器人系統(tǒng)簡(jiǎn)圖(參見(jiàn)右欄)整體來(lái)講,iKid足球機(jī)器人的硬件平臺(tái)由其視覺(jué)系統(tǒng)、決策系統(tǒng)及運(yùn)動(dòng)控制系統(tǒng)構(gòu)成。

2 色彩模型的改進(jìn)
2.1 色彩模型的選取
彩色圖像的方式模型有多種,較為常用的是RGB模型、HSV模型和YUV模型。RGB模型受光線的影響較大,而在比賽中,稍微移動(dòng)一下比賽場(chǎng)地就可能受到影響,進(jìn)而需要重新標(biāo)定。YUV模型中,Y項(xiàng)表示的是光照強(qiáng)度,也就是明亮度(Luminance),U和V表示的是色度(Chrominance)。其中亮度信號(hào)Y
和色度信號(hào)U、V的信息是相互獨(dú)立的,關(guān)聯(lián)性小,同時(shí)降低彩色分量的分辨率也不會(huì)明顯對(duì)圖像的質(zhì)量造成影響。
YUV色彩模型是從RGB模型經(jīng)線性變換而得到的,轉(zhuǎn)換公式如下:
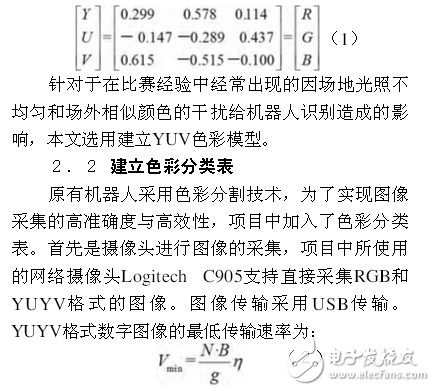
其中,N為圖像分辨率,B為位數(shù), r為幀速率。為了保證足球機(jī)器人在賽場(chǎng)上能較快地進(jìn)行圖像獲取和處理,通過(guò)多次試驗(yàn)選擇將采集到的圖像以RGB的壓縮格式通過(guò)圖像處理器的硬解碼功能轉(zhuǎn)換為YUYV格式圖像。每張圖片能夠用8ms完成格式轉(zhuǎn)換。YUYV色彩模型是抽樣格式,即為YUV4:2:2,保留Y像素,UV在水平空間上每?jī)蓚€(gè)像素采樣一次。
其次建立像素表,像素表表示一個(gè)圖像的YUV與顏色表中的數(shù)據(jù)相互映射的關(guān)系。原始的YUV為三組8位數(shù)據(jù),將三組數(shù)據(jù)并列建立表的索引便可發(fā)現(xiàn)每組數(shù)據(jù)都能被索引到,即通過(guò)某一處的像素點(diǎn)Y、U、V的值在表中進(jìn)行索引得出對(duì)應(yīng)像素點(diǎn)的顏色標(biāo)號(hào)。為了減少光照造成的影響,先讓足球機(jī)器人多次進(jìn)行場(chǎng)地圖像采集,然后對(duì)所拍攝到像素點(diǎn)的Y、U、V的值進(jìn)行統(tǒng)計(jì),進(jìn)而選擇閾值。
在進(jìn)行機(jī)器人顏色標(biāo)定及建立色彩模型的過(guò)程中,分析數(shù)據(jù)發(fā)現(xiàn)環(huán)境照明度的變化對(duì)U和V值的分布影響極小,可認(rèn)為U和V值并不隨著光照條件的變化而變化,色彩校正表一般來(lái)說(shuō)是不需要重新生成的,僅當(dāng)光線發(fā)生較大變化時(shí)仍然需要重新標(biāo)定。
下圖為攝像頭采集到的圖像顏色分離及歸類處理過(guò)程流程:
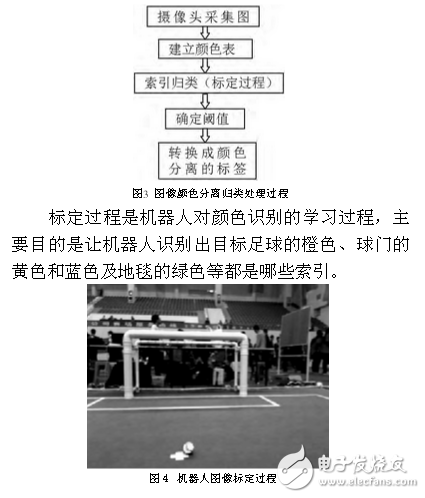
在機(jī)器人識(shí)別的過(guò)程中,還加入了邊緣檢測(cè)方法,主要通過(guò)判斷目標(biāo)球是否為圓形及判斷球門的長(zhǎng)和高是否滿足一定的比例,還有限制機(jī)器人識(shí)別較遠(yuǎn)位置的足球的能力,最終識(shí)別并確定目標(biāo)物體,以保證識(shí)別的準(zhǔn)確性。
3 球的定位
球的定位在機(jī)器人的足球比賽中是至關(guān)重要的一個(gè)環(huán)節(jié),也是機(jī)器人所應(yīng)當(dāng)具備的最基本的功能,
因?yàn)椴徽撨M(jìn)攻、防守都是以球?yàn)橹行牡膶?duì)抗,所以做好足球機(jī)器人對(duì)球的定位具有重要的意義。
iKid機(jī)器人視覺(jué)系統(tǒng)是攝像頭位于機(jī)器人頭部隨著機(jī)器人頭部及身體運(yùn)動(dòng)的單目系統(tǒng)。iKid機(jī)器人原采用的是三角形定位法,經(jīng)場(chǎng)地調(diào)試認(rèn)為該算法對(duì)機(jī)器人的目標(biāo)識(shí)別的精度不能很好地滿足比賽需求,容易產(chǎn)生失誤。因此實(shí)現(xiàn)精確定位的關(guān)鍵在于圖像坐標(biāo)系與機(jī)器人坐標(biāo)系之間的轉(zhuǎn)換。????
單目視覺(jué)系統(tǒng)采集到的是圖像的二維信息,因此需要限制目標(biāo)物體所在的平面,最終確定目標(biāo)物
體的空間位置。采用小孔成像模型建立機(jī)器人目標(biāo)

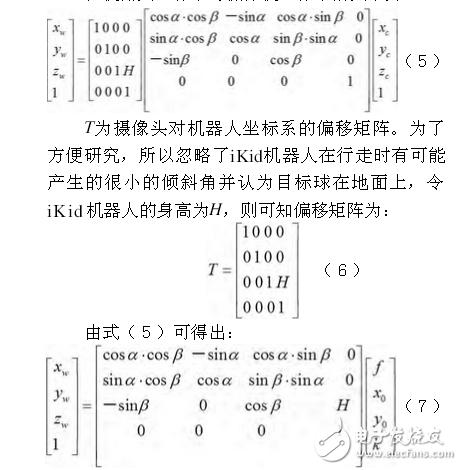
再根據(jù)小孔成像模型所得到了公式(3)聯(lián)立計(jì)算可得:
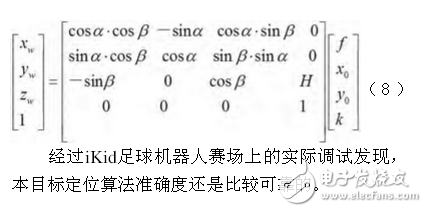
(8) (參見(jiàn)右欄)
其中,k為攝像頭采集到的圖像的放大系數(shù)。
4 目標(biāo)的追蹤算法
為了能夠提高仿人足球機(jī)器人在賽場(chǎng)上找球的效率,進(jìn)行更準(zhǔn)確快速的目標(biāo)定位,本文設(shè)計(jì)采用Camshift算法進(jìn)行目標(biāo)的追蹤。根據(jù)以往的比賽經(jīng)驗(yàn),iKid機(jī)器人在找球的過(guò)程中,一旦由于某些原因丟失了目標(biāo),系統(tǒng)將命令機(jī)器人重新全方位搜索,需要重新對(duì)環(huán)境進(jìn)行識(shí)別和判斷,在賽場(chǎng)上,因來(lái)回找球浪費(fèi)大量時(shí)間對(duì)比賽十分不利,加入目標(biāo)追蹤算法會(huì)大大提高效率。
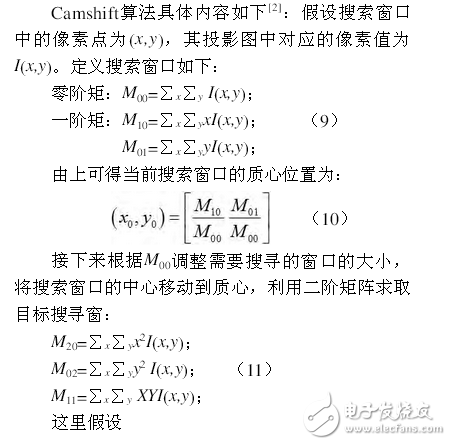
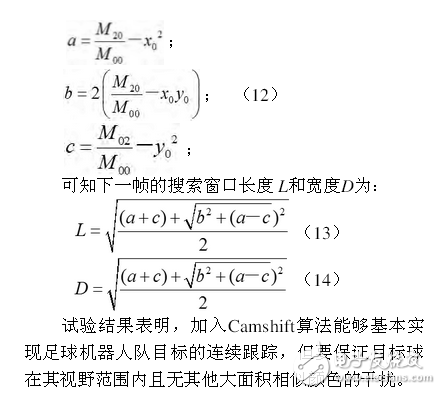
4.1 Camshife算法基本原理
Camshife算法是根據(jù)攝像頭所采集到的視頻圖像,利用目標(biāo)顏色的特征在連續(xù)的視頻圖像中找到移動(dòng)的目標(biāo),進(jìn)而準(zhǔn)確判斷出其位置和大小。在下一幀的所獲得的視頻圖像信息中,利用前一幀的大小位置信息來(lái)初始化搜索范圍,這樣可以大量節(jié)省
尋找目標(biāo)的時(shí)間,進(jìn)而實(shí)現(xiàn)對(duì)目標(biāo)的連續(xù)追蹤。
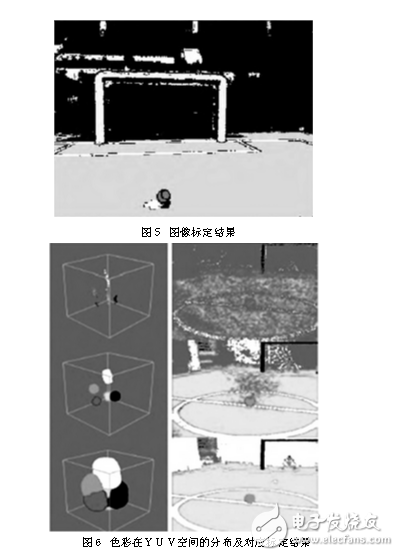
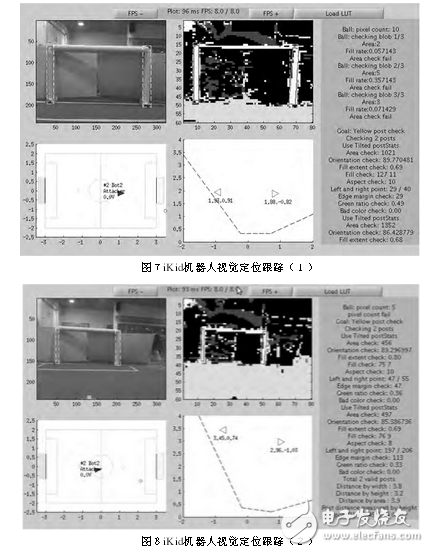
4.2 目標(biāo)定位與追蹤實(shí)驗(yàn)結(jié)果
以iKid足球機(jī)器人為實(shí)驗(yàn)平臺(tái),在比賽場(chǎng)地中進(jìn)行目標(biāo)球的標(biāo)定與識(shí)別,結(jié)果如圖7、8所示。
5 整體結(jié)果
經(jīng)實(shí)際調(diào)試及賽場(chǎng)經(jīng)驗(yàn)數(shù)據(jù)記錄,算法改進(jìn)后,iKid機(jī)器人在視覺(jué)識(shí)別和定位方面有了較大的提高。像素表的建立使機(jī)器人能夠快速查表濾除雜色,提高了識(shí)別的準(zhǔn)確度;加入目標(biāo)追蹤算法實(shí)現(xiàn)了iKid機(jī)器人對(duì)目標(biāo)的追蹤,整體完成了項(xiàng)目預(yù)期的目的。
在仿人機(jī)器人調(diào)試中還遇到下列問(wèn)題,相應(yīng)的解決方法如下:
(1)攝像頭采集圖像時(shí),受光線影響較大,很多相近的顏色難以區(qū)分,選擇閾值較為困難。改進(jìn)措施:對(duì)機(jī)器人攝像頭參數(shù)進(jìn)行調(diào)整,對(duì)光線進(jìn)行補(bǔ)償,得到較好的圖像。
(2)在操作者對(duì)視覺(jué)進(jìn)行標(biāo)定時(shí),需要采集全場(chǎng)各個(gè)角度的圖像,圖像采集標(biāo)定時(shí)較慢。改進(jìn)措施:利用上層決策,使機(jī)器人的攝像頭自主旋轉(zhuǎn),掃描全場(chǎng)來(lái)采集圖像,這樣避免了死角出現(xiàn),也減少了人為采集圖像的時(shí)間,提高了效率。
參考文獻(xiàn):
[1] 胡麗花.基于視覺(jué)的類人足球機(jī)器人目標(biāo)定位算 法設(shè)計(jì)[D].杭州:浙江理工大學(xué),2011.
[2] 王冉.基于Camshift算法的運(yùn)動(dòng)預(yù)測(cè)目標(biāo)跟蹤改 進(jìn)算法研究[D].濟(jì)南:山東大學(xué),2012.
[3] 邱雪娜.基于視覺(jué)的運(yùn)動(dòng)目標(biāo)跟蹤算法及其在移 動(dòng)機(jī)器人中的應(yīng)用[D].上海:華東理工大學(xué),2011.
[4] 馬昕.基于單目視覺(jué)的移動(dòng)機(jī)器人目標(biāo)識(shí)別與定 位[D].濟(jì)南:山東大學(xué),2011.11.
[5] 許家銘,謝侖.一種仿人足球機(jī)器人目標(biāo)定位與追蹤算法[J].華中科技大學(xué)學(xué)報(bào)(自然科學(xué)版), 2011,39(S2):243-245,258










評(píng)論