一種基于模糊神經(jīng)網(wǎng)絡(luò)的機(jī)器人控制技術(shù)

采用高斯函數(shù)作為模糊隸屬函數(shù),將模糊控制與神經(jīng)網(wǎng)絡(luò)相結(jié)合。利用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)模糊推理,運(yùn)用了一種模糊高斯基函數(shù)神經(jīng)網(wǎng)絡(luò).并用于兩關(guān)節(jié)機(jī)器人的軌跡跟蹤控制。仿真結(jié)果表明,該網(wǎng)絡(luò)對機(jī)器人軌跡跟蹤控制具有很好的效果,是一種行之有效的控制方法
本文引用地址:http://www.104case.com/article/201710/367866.htm引言
隨著機(jī)器人技術(shù)與控制技術(shù)的發(fā)展,機(jī)器人在日常生活和工農(nóng)業(yè)生產(chǎn)中得到廣泛應(yīng)用。機(jī)器人對象是一個(gè)非線性、強(qiáng)耦合的多變量系統(tǒng),在運(yùn)動(dòng)過程巾.由于存在摩擦、負(fù)載變化等不確定因素,因而它還是一個(gè)時(shí)變系統(tǒng).
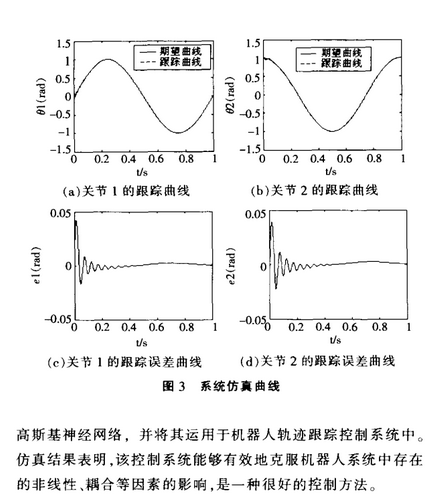
傳統(tǒng)的機(jī)器人控制技術(shù)大多是基于模型的控制方法,無法得到滿意的軌跡跟蹤效果,模糊控制和神經(jīng)網(wǎng)絡(luò)等人工智能的發(fā)展為解決機(jī)器人軌跡跟蹤問題提供了新的思路。普通模糊控制的控制規(guī)則大部分是人們的經(jīng)驗(yàn)總結(jié).不 具備自學(xué)習(xí)、自適應(yīng)的能力,往往還受到人的主觀性的影響.因此不能很好地控制時(shí)變小確定的系統(tǒng)。由于神經(jīng)網(wǎng)絡(luò)具有良好的自學(xué)習(xí)、自適應(yīng)、聯(lián)想等智能,能適應(yīng)系統(tǒng)復(fù)雜多變的動(dòng)態(tài)特性.模糊控制和神經(jīng)網(wǎng)絡(luò)的結(jié)合成為學(xué)者研究的重點(diǎn)。利用神經(jīng)網(wǎng)絡(luò)非線性映射、自學(xué)習(xí)能力來淵整模糊控制.使模糊控制具有一定的自適應(yīng)能力,同時(shí)也使神經(jīng)網(wǎng)絡(luò)獲得了模糊控制的推理歸納能力。本文對模糊神經(jīng)網(wǎng)絡(luò)在機(jī)器人控制中的應(yīng)用進(jìn)行研究,提出了一種模糊高斯基神經(jīng)網(wǎng)絡(luò)的機(jī)器人軌跡跟蹤控制。仿真結(jié)果表明,該控制方法能很好地對機(jī)器人軌跡進(jìn)行跟蹤。












評論