“夜猴”跳躍機器人驚艷全球媒體 敏捷性達到每秒1.7米

然而,霍爾丹團隊希望設計出能夠匹敵夜猴跳躍高度和跳躍頻率的微型跳躍機器人,從而達到相似的高敏捷性。最終,研究者研發的仿生跳躍機器人敏捷性與夜猴十分接近,每隔0.58秒可以跳躍1米,敏捷性為1.7 m / s。
本文引用地址:http://www.104case.com/article/201612/341344.htmSalto的基本跳躍單元與常見的跳躍機器人類似:彈性元件,如彈簧。不同的是,Salto跳躍系統中的彈性元件(有點類似橡膠的能夠扭曲的彈簧)是串聯放置的,從而獲得串聯彈性驅動器(SEA)。串聯彈性驅動器性能很好,不僅有助于保護電機,還能進行力控制,使得跳躍系統能夠被動恢復一些能量,并且能夠進行功率調制。

其中,功率調制非常重要。功率調制指的是一個受控(調制)的能量存儲和釋放過程。在類似Salto這樣的跳躍機器人的情況下,這意味著能夠以一個相對較長的時間向系統彈性元件輸送能量,然后以相對較短的時間釋放該能量。
大多數性能優異的跳躍機器人都是使用彈性驅動器來調制其供能的方式:利用馬達卷起彈簧儲存能量,然后立即釋放所有能量用以跳躍。如果能夠直接利用馬達的輸出功率,跳躍機器人的性能會更好。
夜猴的肌肉和肌腱就類似人工系統中的彈簧。然而,研究者實現Salto高敏捷跳躍系統主要模擬了夜猴另一提高其跳躍能力的特點:具有可變機械增益(mechanical advantage,MA)的腿。夜猴腿部的結構以及其跳躍時的技巧,使得夜猴的跳躍能力比單獨使用肌肉時獲得驚人的15倍提升!這才是研究人員為Salto尋找的秘密武器。
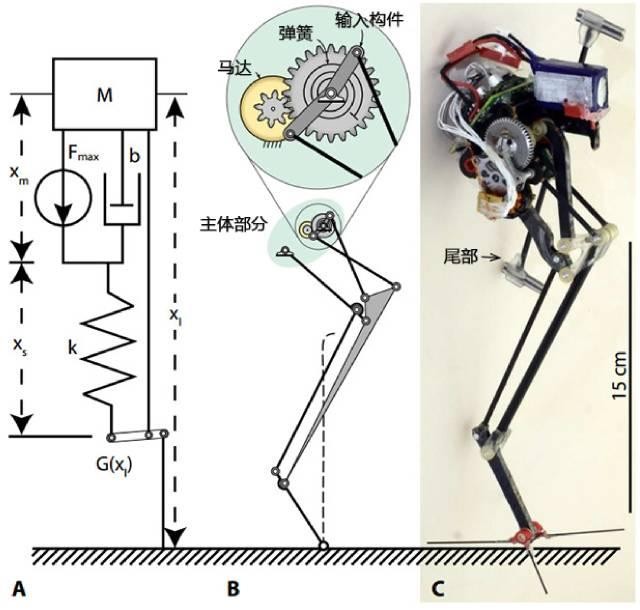
功率調制模型及實例。(A)功率調制系統模型,包含串聯彈性驅動器以及機械增益(MA)模塊。(B)機器人機構的鏈接示意圖。(C)Salto跳躍機器人的整體實物圖。
機械增益(MA)指的就是利用杠桿(如撬棍)將較小的力和較大的運動幅度轉換為較大的力和較小的運動幅度。
Salto(以及夜猴和其他跳躍動物)腿部結構的獨特之處在于其機械增益是可變的:當腿蜷縮時(當機器人或動物處于蹲伏狀態時),具有非常低的機械增益;而在跳躍運動開始時,盡可能地保持低機械增益;然后,隨著跳躍運動進行和腿部伸展,機械增益迅速增加。
實質上,這種技巧減緩了起跳的過程,從而保證了足部與地面接觸更多的時間。霍爾丹稱夜猴的這種蹲伏狀態為“超蜷縮”(super crouch)。
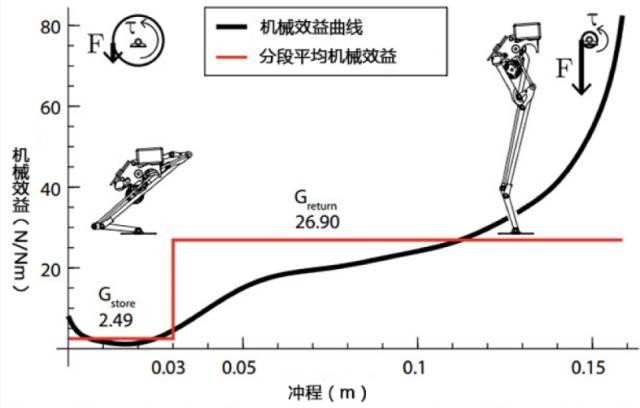
機械增益(mechanicaladvantage,MA)模塊作為腿部伸展功能。卡通圖表示機器人腿部機構完全蹲伏以及完全伸展的狀態。
這種基于機械增益調節的蹲伏狀態使得Salto機器人在起跳階段與地面的接觸時間增加60毫秒。雖然,60毫秒聽起來微乎其微、甚至察覺不到,但相比于不可變機械增益系統,Salto的這種可變機械增益使得通過其腿部傳輸的能量提升超過兩倍之多!相應的跳躍功率提升了接近3倍!
類似Salto但僅使用串聯彈性驅動器(不具備可變機械增益)的跳躍機器人能夠跳到0.75米,而Salto(具有可變機械增益)能夠跳躍高達1米。
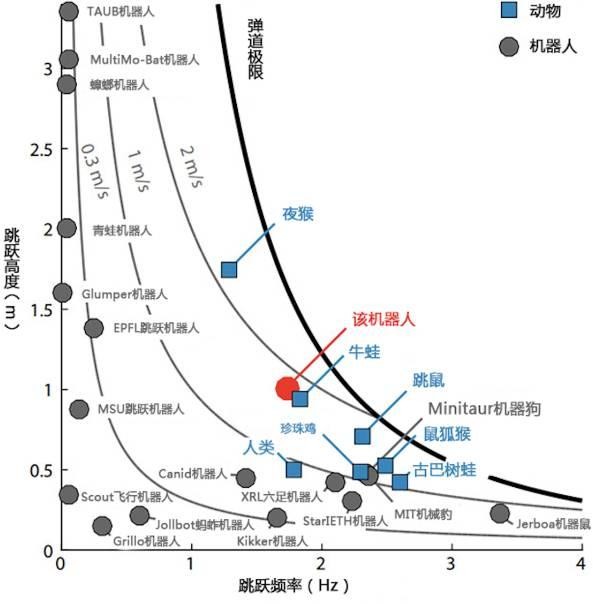
各種動物(藍色方塊)及機器人系統(灰色圓點)的跳躍高度增益和跳躍頻率。圖中三條灰色雙曲線分別表示三個敏捷性常數0.3 m/s、1 m/s和2m/s。紅色圓點表示伯克利研究者的微型跳躍機器人。
這就是Salto如此酷的地方:僅利用一個仿生動物腿部設計的小花招,就能獲得跳躍性能的巨大提升!雖然目前Salto還不能完全匹敵夜猴,但足以和牛蛙表現的一樣好(如圖紅點位置)。
此外,炫酷的Salto已經能夠輕松彈離墻面玩“跑酷”運動(Parkour)——利用垂直墻面增加Salto的彈跳高度或者改變彈跳方向。當然,你可能已經注意到Salto目前還沒有很多感知能力,其跳躍運動也是開環的。Salto利用旋轉慣性尾定位自身,但其尚不能獨立適應不同的表面。
研究人員稱,下一步計劃包括研究新的運動模式以及集成傳感器實現多級跳躍。此外,還有可能增加一條腿(或三條腿)進行有意思的研究,但至少在近期,霍爾丹稱其將繼續挖掘單腿版本的Salto的潛力。
此外,值得一提的是,Salto使用的可變機械增益腿部結構能夠兼容大多數使用串聯彈性驅動器(SEA)的其他腿式機器人,如StarlETH、ANYmal或ATRIAS。這種可變機械增益結構如何提升其他平臺的性能和效率,我們拭目以待。










評論