汽車電動助力轉向系統電控單元的研究及設計

為了減小計算量,提高轉向系統的實時性,本設計采用增量式PID控制,用控制量的增量△u作為作為控制器的輸出。其實現方法如下:
設助力電機目標電流為i,實際當前助力電流為io,則控制偏差為:
ek=i-io (12)
△u=u(k)-u(k-1) (13)
助力電機目標電流可以由單片機根據當前車速、輸入轉矩、助力特性曲線計算得到。然后由式(11)、(12)、(13)可獲得對應的PWM增量△u。
PID參數可以由試湊發初步得到,然后根據試驗結果進行修正。
3 硬件設計
3.1 總體設計
單片機是控制器的核心,其選型需要考慮適用性、可靠性、片內資源、價格等多種因素。單片機選型恰當與否直接影響機構控制系統的性能及設計難易程度度。本設計采用Freescale公司的16位高精度MC9S12DP256單片機。MC9S12DP256內置5個CAN模塊、2個8通道10位A/D轉換模塊、8個PWM通道,總線速度25 MHz,采用5 V供電,112腳LQFP封裝。此單片機,內部資源豐富,可大大簡化控制系統硬件電路,其可靠性高,非常適用于EPS控制。設計中沒有用到的管腳引到電路板上,以便于后續開發。
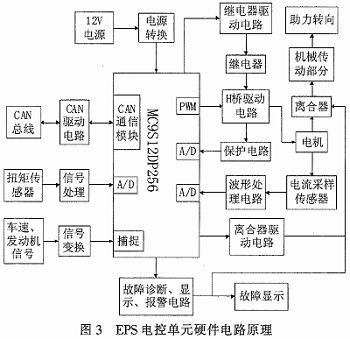
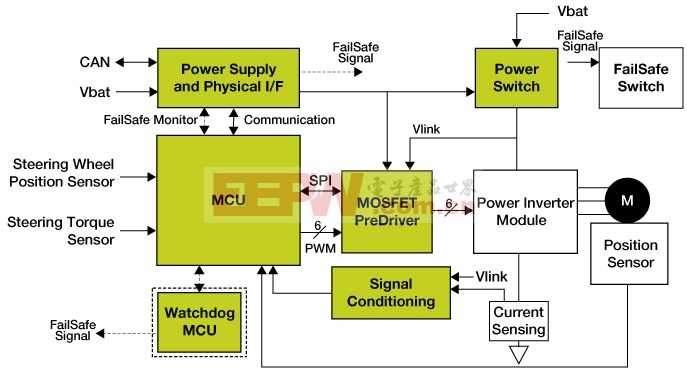
硬件設計如圖3所示。車速、發動機、轉矩信號經處理后送給MC9S12DP256單片機,經單片機計算后,得到電機助力電流值,經驅動電路后作用于助力電機,控制電機輸出力矩的大小和方向,同時對電機電流進行采樣,并送回單片機,形成閉環控制。在助力控制基礎上,設計了電機保護電路和故障診斷與提示電路。一旦檢測到故障存在,立即斷開離合器,改用純手動轉向,并發出故障信號,從而保證了行車安全。
3.2 控制系統硬件電路設計
硬件電路設計主要包括電源轉換電路、扭矩信號處理電路、車速信號處理電路、CAN通信電路、時鐘電路。具體設計如下:
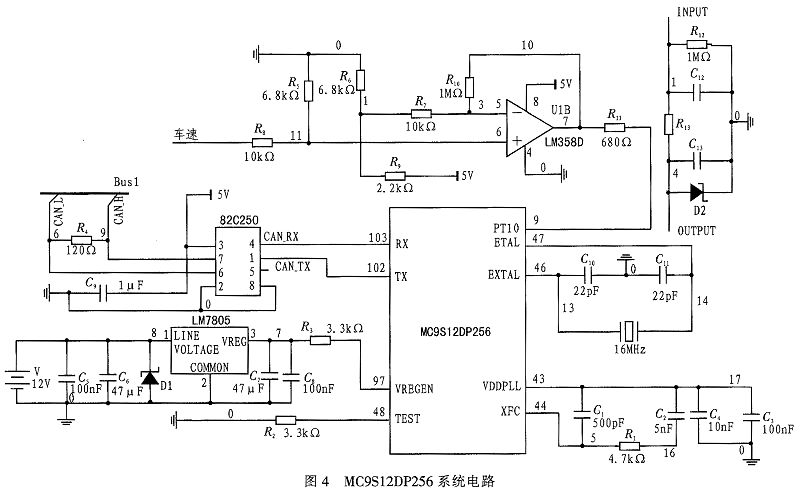
電源轉換由于單片機工作時管腳電壓為+5 V供電,而車載電源電壓為+12 V。因此,需要對+12 V電壓進行轉換,變成+5 V。本設計中采用7805電壓轉換芯片進行電壓變換。
扭矩信號處理由于扭轉傳感器獲得的是一些微弱的小信號,容易受干擾,因此需要對其進行濾波處理。本設計采用型濾波電路,R12取大電阻,提高輸入阻抗。
車速處理電路車速信號為+12 V單極性方波,電壓太高,不能直接用于單片機,需要將其變換為+5 V以內的方波。利用LM358對其進行處理,經轉換后得到高電平為3.72 V,低電平為0.01V的方波信號。
CAN總線驅動電路MC9S12DP256內部集成了CAN總線控制器,CAN驅動電路只需要物理層驅動即可。本設計選用82C250芯片進行設計。
時鐘電路時鐘是單片機工作的基礎。MC9S12DP256單片機內部集成了壓控振蕩器,可在其43、44和46、47引腳分別接上鎖相環電路和16MHz的晶振電路。組成MC9S12DP256時鐘電路,提供25MHz的時鐘信號。
具體電路設計如圖4所示。
4 系統軟件設計
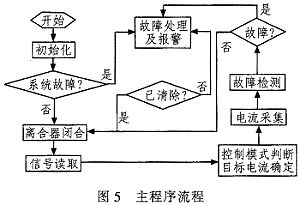
EPS控制軟件采用模塊化設計,包括進行系統初始化、信號采集、控制狀態判、控制模式判斷、PWM占空比計算、系統狀態監控及保護、電流閉環模塊、通信模塊等。EPS控制系統需要同時執行多個任務,為了保證系統的實時性和可靠性,采用中斷服務方式,將整個軟件部分分為主程序和中斷服務子程序。主程序設計流程如圖5所示。
5 結束語
文中分析了汽車電動助力轉向系統的工作原理.設計了直線型助力特性曲線,建立了增量式閉環PID控制策略,減小了芯片的計算量,增強了系統的助力跟隨性。利用MC9S1 2DP256單片機的豐富內部資源,簡化了EPS硬件電路系統,降低了電路間的干擾,從而提升了系統可靠性,設計了基于MC9S12DP256的EPS控制系統硬件電路,并給出了軟件設計流程。本文設計的EPS系統可以編寫多種EPS控制算法,有利于后續深入研究。對于控制性能的優化將在進一步的控制策略研究和試驗中進行。




評論