一種基于線性化直升機數學模型的仿真系統

摘要:為了配合飛行控制系統的設計和開發,本文設計了一種基于線性化直升機數學模型的半物理仿真系統。重點講述了仿真系統的系統結構以及各個組成部分的功能,描述了線性化直升機仿真模型的基本原理和實現過程,并以航線飛行為例給出了仿真過程和仿真結果。實際使用表明,本系統具有結構簡單、仿真準確、可靠性高的特點,達到了設計要求。
本文引用地址:http://www.104case.com/article/201610/307880.htm關鍵詞:無人直升機;線性化模型;數學模型;仿真系統;半物理仿真
飛行控制系統決定了無人直升機的飛行性能,隨著無人直升機性能的不斷提高及功能的日益增加,飛行控制系統越來越復雜。某型半物理仿真系統是為配合飛行控制系統設計而開發的,主要為直升機飛行動力學模型的驗證與評估、飛行控制軟件的設計與驗證等提供強有力的技術支撐平臺。這對于提升飛行控制系統設計的效率、減少設計差錯、縮短設計周期及降低設計成本具有重要意義。
1 仿真系統功能
某型半物理仿真系統的主要功能包括:
1)模擬無人直升機從起飛到降落整個飛行過程的全狀態,進行全包線仿真;
2)評估驗證直升機飛行動力學模型的準確性;
3)模擬無人直升機各個傳感系統的報文和動態特性;
4)可接入飛行控制計算機實物、舵機系統和地面站實物(除去電臺部分),進行半物理仿真實驗。
2 仿真系統結構
根據無人直升機仿真模型獲取方式不同,某型半物理仿真系統如圖1、圖2所示,形成了兩種半物理仿真系統結構。
2.1 采用外部模型機的FlightLab直升機模型
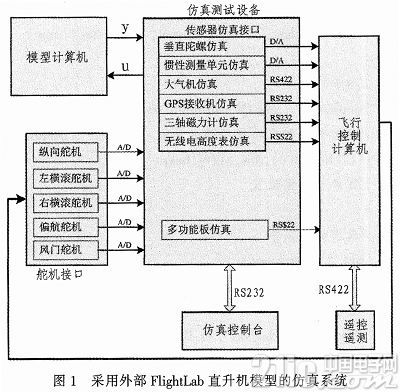
如圖1所示,該仿真系統由仿真測試設備、模型計算機、舵回路和飛控計算機等組成。其中,與仿真測試設備相配合的還有仿真控制臺,與飛控計算機相配合的還有地面站測控軟件。
1)仿真測試設備:運行仿真軟件,其中主要包括傳感器信息模擬軟件、舵機信息模擬軟件、多功能板信息模擬軟件。各個模擬軟件之間采用共享內存的方式進行信息交互。主要功能包括:①舵控指令接收解算并轉換成4個操縱量作為模型輸入信息;②直升機模型接收操縱指令,解算得到飛行狀態信息作為傳感器輸入數據信息;③模擬傳感系統的報文和動態特性;④和飛控計算機之間進行網絡通信;⑤和模型機之間進行網絡通信。
2)模型計算機:運行無人直升機FlightLab仿真模型;接收控制輸入,并解算得到無人直升機實時狀態數據。
3)舵回路:舵機可接實物舵機,也可直接通過仿真測試設備中的舵機信息模擬軟件進行模擬。
4)飛控計算機:運行飛行控制軟件,接收傳感器狀態信息以及遙控信息,根據無人直升機當前的飛行狀態以及操縱指令解算得到舵機控制指令。
5)仿真控制臺:運行仿真界面程序,可接受用戶界面輸入信息,主要實現模型狀態量的曲線顯示功能,以及各種傳感器故障類型仿真、模型運行與重載控制等功能。
6)地面測控計算機:運行地面測控軟件,用于對飛行控制計算機發送遙控指令,控制無人直升機的飛行模態,并接收飛行控制計算機的下行數據,顯示、記錄無人直升機飛行過程和任務設備運行狀態。
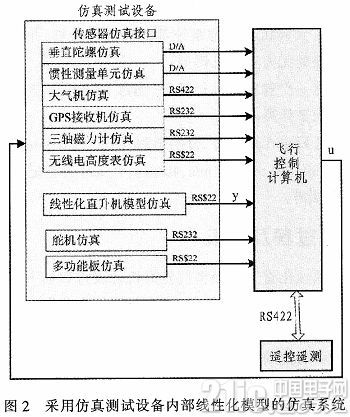
2.2 采用仿真測試設備內部的線性化模型
如圖2所示,該仿真系統由仿真測試設備、飛控計算機和地面站測控軟件等組成。其中,仿真測試設備中除了運行傳感器信息模擬軟件、舵機信息模擬軟件、多功能板信息模擬軟件,還將運行線性化直升機數學模型模擬軟件。相比于2.1節所述的半物理仿真系統,該系統平臺搭建簡單且攜帶方便。但是,受到線性化直升機數學模型的精度限制,該系統僅適用于對仿真精度不高的情況。
3 線性化直升機模型
當進行飛控軟件邏輯仿真或者其他對模型精度要求不高的仿真時,常采用仿真機內部的直升機線性模型。其主要優勢在于便于快速搭建仿真平臺,易于攜帶(不需要再攜帶模型機),特別是大大方便在外場調試過程中的仿真工作。
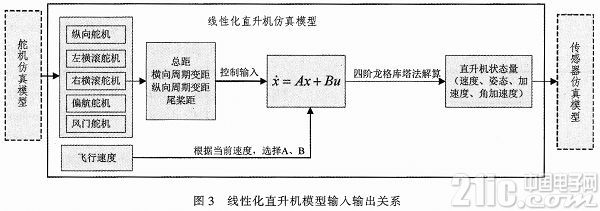
線性化直升機模型主要實現以下功能:接收飛控計算機解算出的控制輸入數據;實時運行仿真模型;最后將模型解算得到直升機的相關狀態數據反饋給飛控計算機。線性化直升機模型仿真模塊的輸入輸出關系如圖3所示。
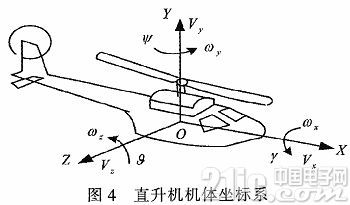
被控對象數學模型建立于機體坐標系,如圖4所示。
采用狀態空間表達式形式描述,給定被控對象的數學模型為:
其中,狀態x=[Vx Vy Vz ωx ωy ωz γ ψ θ]T,分別表示直升機縱向速度、垂向速度、橫向速度、滾轉角速度、偏航角速度、俯仰角速度、滾轉角、偏航角和俯仰角;控制輸入u=[φ7A1 B1 φT]T,分別表示旋翼總距、橫向周期變距、縱向周期變距和尾槳總距。
狀態矩陣A和控制矩陣B通過FlightLah計算得到,且隨著無人直升機飛行狀態的不同而改變。具體計算過程如下:
1)在FlightLab開發環境下,分別對主旋翼、尾槳、機身、平尾、垂尾、發動機和飛控系統等部件進行建模,并最終綜合成一個完整的無人直升機模型;
2)給定一個穩定的飛行狀態,通過FlightLab進行模型的線性化和配平計算;
3)通過FlightLab計算,分別得到0m/s、3m/s、9m/s、15 m/s、20 m/s、25m/s、30 m/s、35 m/s、40 m/s、45 m/s等穩定飛行狀態下的A、B矩陣。
4 仿真過程及結果
基于線性化直升機模型的直升機仿真過程如下:
1)啟動各個傳感器、舵機、多功能板仿真程序;
2)啟動線性化直升機模型仿真程序:
3)啟動飛行控制軟件程序;
4)通過測控軟件,發送飛行控制指令,開始飛行仿真;
5)通過測控軟件,顯示、記錄仿真過程參數;
6)對飛行仿真結果進行參數分析。
以航線飛行仿真為例,其仿真結果如圖5~7所示。

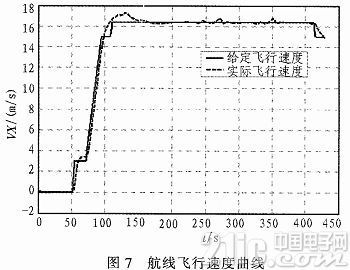
由仿真曲線可知,航線飛行高度100 m,高度控制精度能達到飛行高度的3%,飛行速度16 m/s,速度穩態控制精度能達到±1 m/s。
5 結論
該仿真系統的建立為無人直升機設計和控制策略的研究提供了試驗平臺,且方便攜帶和實際使用操作。實踐表明,這套仿真系統可以非常有效地驗證飛行控制系統的控制邏輯,直觀地驗證飛行控制系統控制效果的優劣,為飛控系統的優化設計和系統的性能評估等提供數據支持,具備了較好的工程應用價值。


評論