三相雙向PWM整流器模型與控制電路設計

摘要 為解決傳統多脈沖變壓整流器架構復雜,功率因數隨著電壓頻率增加,輸入功率因素也相應減少的問題。文中采用高頻功率變換技術,對PWM整流器的模型與控制電路設計方法進行了分析,并在此基礎上介紹了主電路參數的設計。并通過仿真和試驗結果表明,文中所述設計的PWM整流器,達到了抑制諧波電流的目的,并可滿足直流側電壓的抗干擾性和動態穩態性能,為PWM整流器參數的設計提供了參考。
本文引用地址:http://www.104case.com/article/201610/307879.htm雖然多脈沖變壓整流器具有簡單可靠等優點,但如果為了減小輸入電流諧波含量,要求脈沖數量盡可能多,隨著脈沖數量的增多,多脈沖變壓整流器的結構將變得復雜。同時,由于在多脈沖變壓整流器的輸入端加入了濾波電感,當輸入電壓頻率增加時,其輸入功率因數也要減小。PWM整流器采用高頻功率變換技術,能夠有效的減小設備的體積、重量,且在一定頻率范圍內輸入電流基本上正弦,且輸入功率因數基本為1,且不受頻率變化的影響,另外能量也可雙向流動。
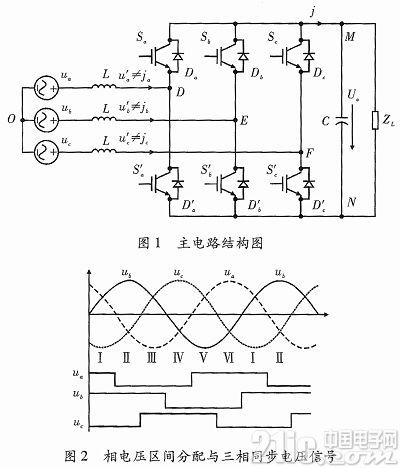
三相雙向整流器主電路結構如圖1所示,采用三相電壓源逆變器實現能量雙向流動。三相交流母線電壓波形如圖2所示,在一個周期內根據交流母線相電壓的過零點劃分為6個區間。
PWM整流器的控制方法采用簡單空間矢量下單周控制方法。該控制電路包含4個部分:區間劃分電路、電流選擇電路、驅動選擇電路和單周控制電路。
(1)區間劃分電路。用于進行三相電壓區間劃分,檢測三相輸入電壓矢量處于哪個區間。該部分由3個結構相同的電壓比較器U1A、U1B和U2A組成,通過輸入電壓與零電平比較進行區間劃分。
(2)輸入電流選擇電路。根據電壓矢量區間劃分信號選擇輸入的電源電流以確定ip、in相對應的值。
(3)驅動選擇電路。根據電壓矢量區間劃分信號確定Qp、Qn相對應的控制主電路開關的導通和關斷的驅動信號。
(4)單周控制電路,是整個控制電路的核心,控制算法運算的單元。
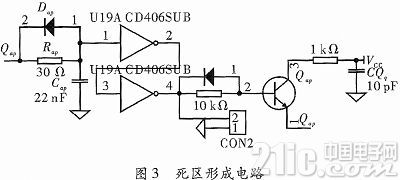
由于主電路采用橋式結構,為防止上下橋臂發生直通的現象必須加入死區電路,死區形成電路如圖3所示。
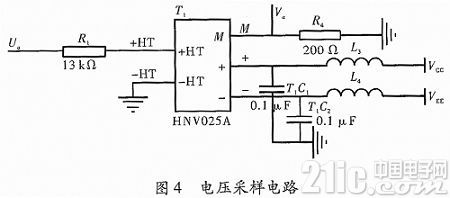
在三相三橋臂三相三線制和三相四橋臂三相四線制有源電力濾波器中,均需要采樣電壓為三相電源電壓Va、Vb、Vc和直流側電容電壓E。三相電源電壓Va、 Vb、Vc采用電壓傳感器得到,能夠實現主電路與控制電路的電氣隔離,采樣電路共3路,結構相同,其中一路的電路如圖4所示,直流側電容電壓E采用采樣電阻分壓得到。
2 電路參數設計
為了系統能夠穩定運行,功率主電路直流側電容電壓必須滿足一定條件。首先,直流側電壓必須足夠高以保證系統工作在升壓模式;第二直流側電容電壓如果過高會提高器件的耐壓定額,增加系統成本,同時也降低系統的可靠性;第三直流側電壓過高會造成系統局部不穩定。直流側電容電壓的取值范圍為
![]()
本系統中電網電壓ua=ub=uc=(115±15%)V(有效值),由式(1)可得,直流側電容電壓取值為360 V
直流側電容的主要作用有:(1)緩沖整流器交流側與直流側負載建的能量交換,且穩定直流側電壓。(2)抑制直流側諧波電壓。一般而言,從滿足電壓環控制的跟隨性指標看,直流側電容應盡量小,以滿足直流側電壓的快速跟隨控制;從滿足電壓環控制的抗擾性指標分析,直流側電容應盡量大,以限制負載擾動時的直流電壓動態壓降。
由跟隨性指標可根據式(2)求得直流側電容容量的上限值

實際上,式(4)的條件一般不能滿足,因此應根據實際情況考慮。
在本系統中,要求紋波電壓△E不超過直流側平均電壓E的2%,即△E=2%×E,直流側平均電壓E通過PI調節器設置為380~450 V,PWM整流器的功率PN(t)為6 kW,電源為ua=ub=uc=(115±15%)V(有效值)/400 Hz。在實際電路中采用兩個相同的電解電容(470μF/450 V)并聯構成直流側電容。
PWM整流器的容量S=3UI,U為電網相電壓有效值,I為電網輸出相電流有效值。PWM整流器容量為6 kVA,電網額定相電壓有效值為115 V。因此,可求得三相電網相電流峰值為25 A。
按照主電路電流電壓要求,并留取一定余量,考慮到功率器件的開關速度、驅動電路的簡潔、散熱快、安裝方便,選用6MBP75RA060 IPM智能模塊,額定電流為75 A,額定工作直流電壓為600 V。
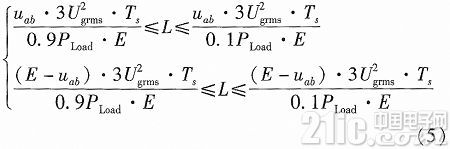
交流側電感根據式(5)選取,選取電感值為0.8 mH。
3 仿真與試驗結果
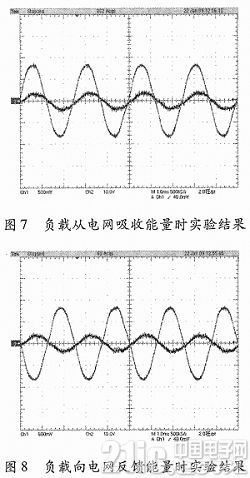
采用上述設計方法的仿真結果如圖5和圖6所示。
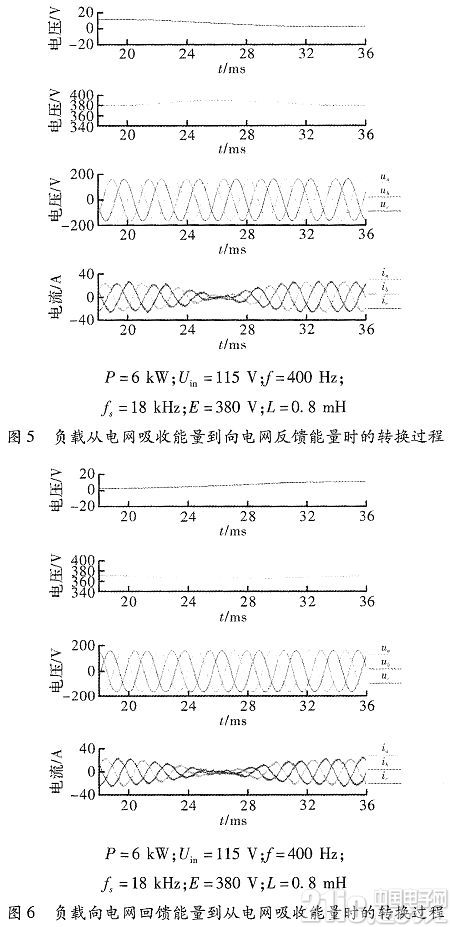
如圖5和圖6所示,當負載在從電網吸收能量和向電網反饋能量兩種工作狀態轉換時,三相交流輸入電流能夠平滑的轉換。在兩種模式下,三相交流輸入電流均為近似正弦,當負載在從電網吸收能量工作狀態時,三相交流輸入電流與三相交流輸入電壓同相,整流器工作在整流模式從電網吸收能量;當為向電網反饋能量工作狀態時,三相交流輸入電流與三相交流輸入電壓反相,整流器工作在逆變模式向電網回饋能量。Vm的變化反映了整流器工作模式的變化,當負載穩定工作時Vm為一常量,當負載由從電網吸收能量電向電網反饋能量時Vm減小;當負載向電網反饋能量到從電網吸收能量時Vm增大。
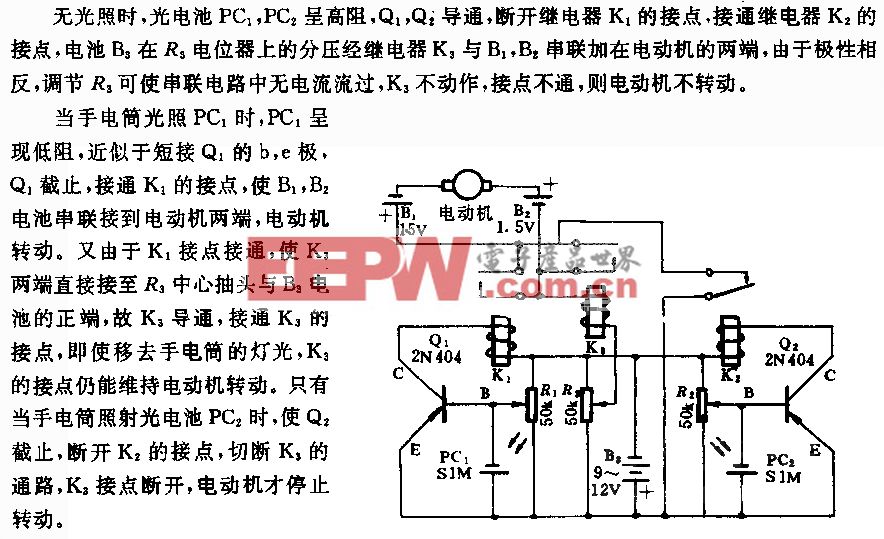
實驗波形如圖7和圖8所示,電壓衰減了10倍,電流為20 mV對應1 A。圖7為負載從電網吸收能量時A相輸入電壓和A相輸入電流的實驗波形;圖8為負載向電網反饋能量時A相輸入電壓和A相輸入電流的實驗波形。由圖7可知,負載從電網吸收能量時,A相輸入電流為與A相電壓同相的正弦波;由圖8可知,負載向電網反饋能量時,A相輸入電流為與A相電壓反相的正弦波。
4 結束語
由仿真和試驗結果可知,按本文所述方法設計的PWM整流器,網側電流波形基本保持正弦,且輸入功率因數基本為1,不受頻率變化的影響,另外能量也可雙向流動。由此表明,本文給出的控制電路設計方法和參數設計,可達到抑制諧波電流的目的,滿足直流側電壓的抗干擾性和動態穩態性能,為PWM整流器參數的設計提供了參考。




評論