以STM32F103為核心的智能滅火機器人

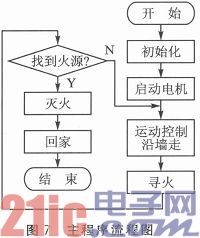
機器人運動控制程序采用沿墻走算法,由ADC采樣程序、電機開啟、電機停止、電機速度和方向控制程序、延時程序等部分構成。通過紅外測距傳感器采集的信息,全方位地判斷障礙物的情況,控制機器人的下一步運動方式,主要有直走、后退、左微調、右微調、左轉彎、右轉彎等。
機器人滅火程序主要完成火源的尋找、確認以及滅火任務并回家。在機器人檢測到房間內有火源時,采用趨光走算法,根據火焰傳感器組的狀態,調整機器人運動角度,使其直面火源方向前進。當檢測到房間內火源周圍白線時,停止運動,開啟風扇滅火;當檢測不到火源時,滅火成功。最后,啟動回家模式,該模式采用沿墻走避障算法。
該軟件系統具有很大的靈活性,因為各程序是分模塊設計的,當比賽規則改變時,只需通過主程序調用不同的模塊即可完成新的任務。
3 結果與分析
對本系統進行性能測試,測試中首先對電機進行測試,電機在正常工作電壓下,調整軟件系統的PWM控制值,可以實現電機的調速、直行前進、后退、左微轉、右微轉、左轉90°和右轉90°等功能。然后對機器人在比賽場地進行滅火實驗,共進行30次實驗,隨機地把點燃的蠟燭放在各個房間的指定位置。機器人都能順利地找到火源,滅火回家且所用時間均在1 min之內,試驗中沒有出現碰壁現象。此數據表明機器人能平穩地按照靠墻走原則完成任務。整個系統具有很快的響應速度、較高的穩定性和較強的抗干擾能力。








評論