一種以CNA/CANopen總線為基礎的分布式高機動雷達伺

我公司運用目前歐美盛行的CAN總線技術和產品,為雷達伺服系統提供包括座車調平、天線方位、俯仰、折疊和極化等功能的全套的網絡化控制解決方案。CAN 是Controller Area Network 的縮寫,是ISO國際標準化的串行通信協議。CAN屬于現場總線的范疇,它是一種有效支持分布式控制或實時控制的串行通信網絡。較之目前許多RS-485 基于R線構建的分布式控制系統而言, 基于CAN總線的分布式控制系統在以下方面具有明顯的優越性:第一,網絡各節點之間的數據通信實時性強;第二,縮短了開發周期;第三,已形成國際標準的現場總線;第四,最有前途的現場總線之一。
本文引用地址:http://www.104case.com/article/201609/304775.htm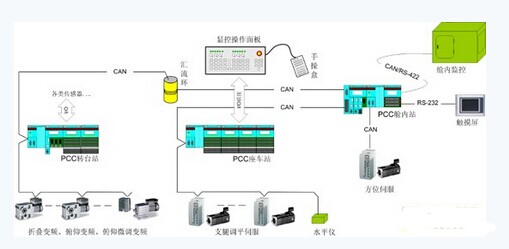





評論