VR交互技術盤點 3D手勢識別不是唯一選擇

1. 結構光(Structure Light)
本文引用地址:http://www.104case.com/article/201608/295647.htm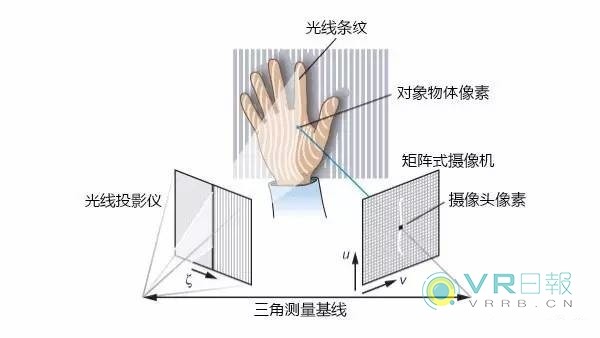
結構光的代表應用產品就是PrimeSense的Kinect一代了。
這種技術的基本原理是,加載一個激光投射器,在激光投射器外面放一個刻有特定圖樣的光柵,激光通過光柵進行投射成像時會發生折射,從而使得激光最終在物體表面上的落點產生位移。
當物體距離激光投射器比較近的時候,折射而產生的位移就較小;當物體距離較遠時,折射而產生的位移也就會相應的變大。這時使用一個攝像頭來檢測采集投射到物體表面上的圖樣,通過圖樣的位移變化,就能用算法計算出物體的位置和深度信息,進而復原整個三維空間。
以Kinect一代的結構光技術來說,因為依賴于激光折射后產生的落點位移,所以在太近的距離上,折射導致的位移尚不明顯,使用該技術就不能太精確的計算出深度信息,所以1米到4米是其最佳應用范圍。
2. 光飛時間(Time of Flight)
光飛時間是SoftKinetic公司所采用的技術,該公司為Intel提供帶手勢識別功能的三維攝像頭。同時,這一硬件技術也是微軟新一代Kinect所使用的。
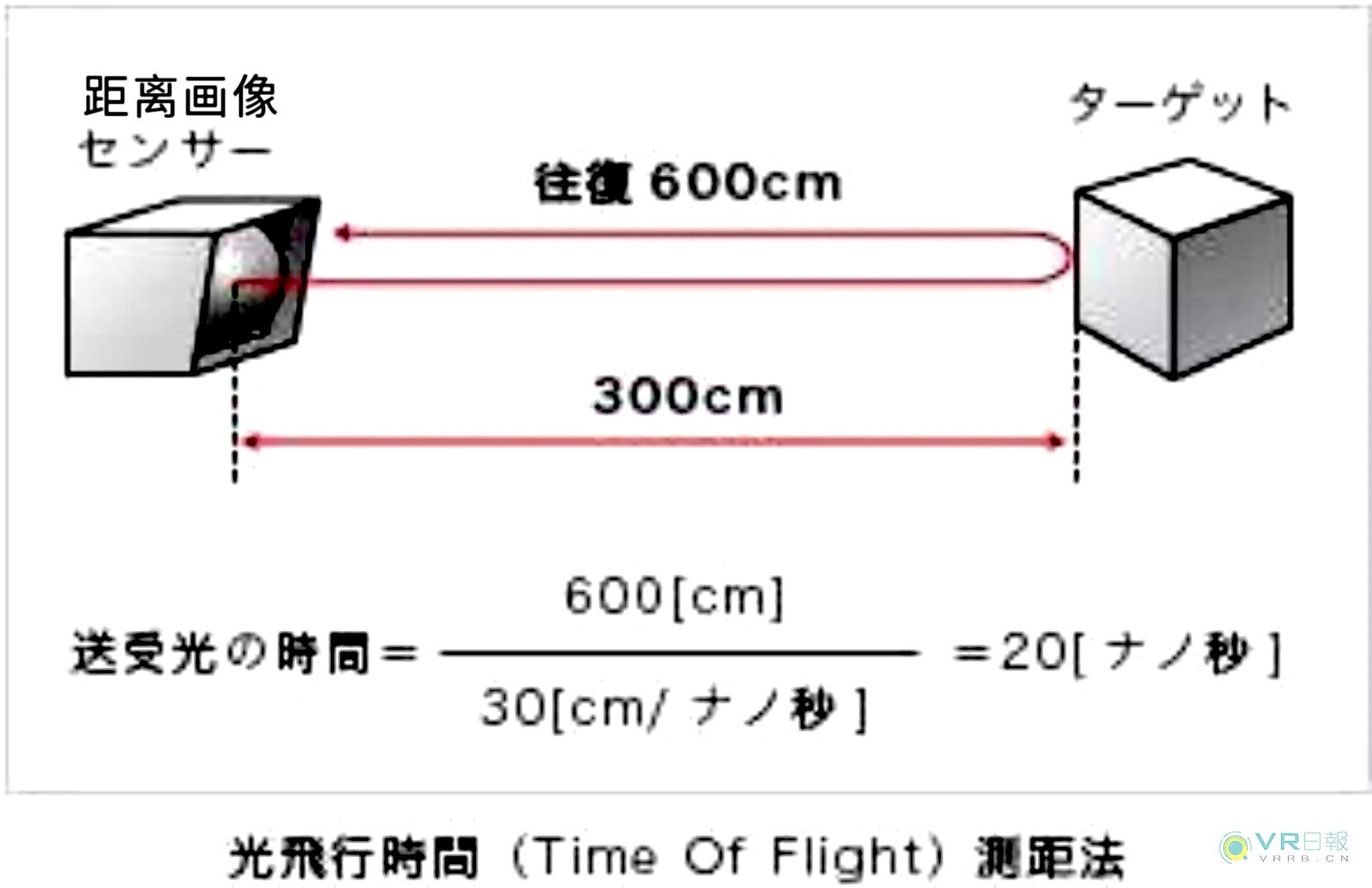
這種技術的基本原理是加載一個發光元件,發光元件發出的光子在碰到物體表面后會反射回來。使用一個特別的CMOS傳感器來捕捉這些由發光元件發出、又從物體表面反射回來的光子,就能得到光子的飛行時間。根據光子飛行時間進而可以推算出光子飛行的距離,也就得到了物體的深度信息。就計算上而言,光飛時間是三維手勢識別中最簡單的,不需要任何計算機視覺方面的計算。
3. 多角成像(Multi-camera)
多角成像這一技術的代表產品是Leap Motion公司的同名產品和Usens公司的Fingo。
這種技術的基本原理是使用兩個或者兩個以上的攝像頭同時攝取圖像,就好像是人類用雙眼、昆蟲用多目復眼來觀察世界,通過比對這些不同攝像頭在同一時刻獲得的圖像的差別,使用算法來計算深度信息,從而多角三維成像。
在這里我們以兩個攝像頭成像來簡單解釋一下:
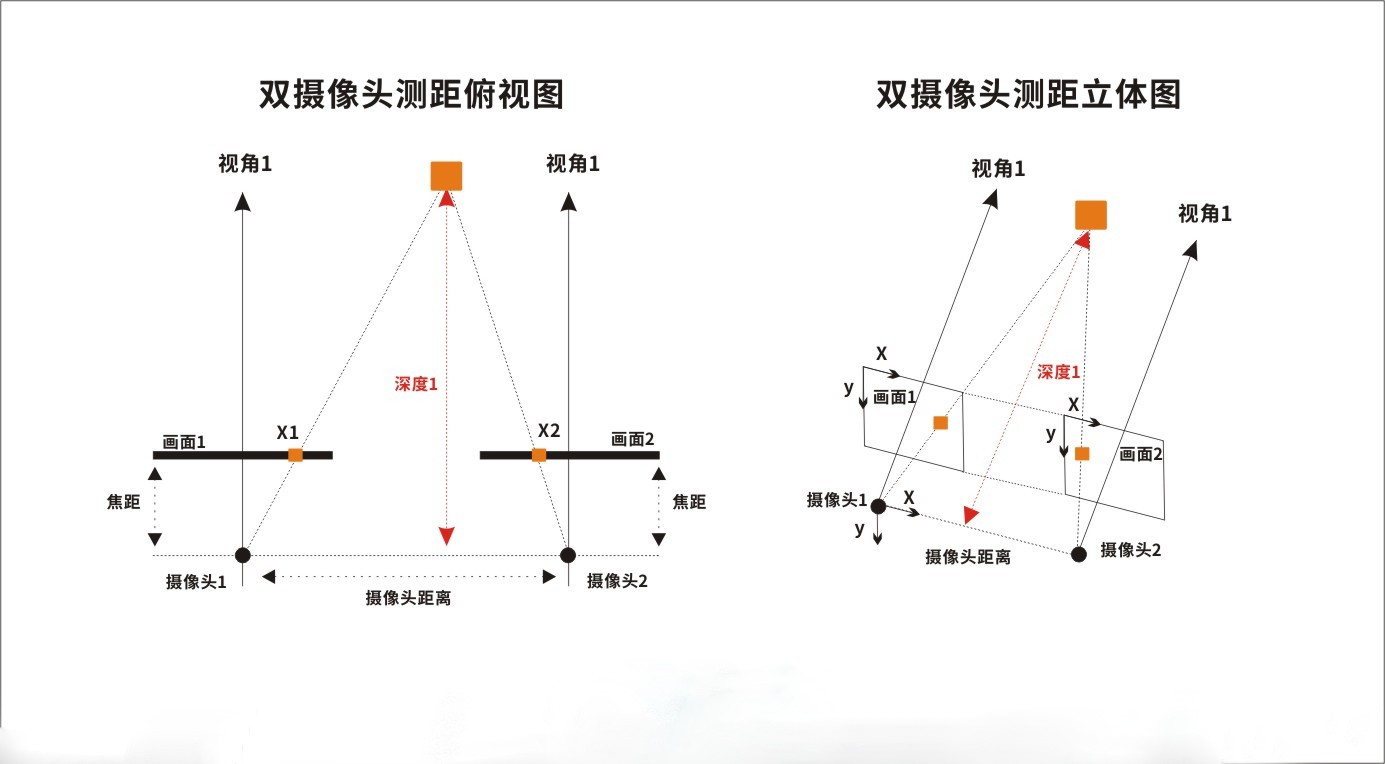
雙攝像頭測距是根據幾何原理來計算深度信息的。使用兩臺攝像機對當前環境進行拍攝,得到兩幅針對同一環境的不同視角照片,實際上就是模擬了人眼工作的原理。因為兩臺攝像機的各項參數以及它們之間相對位置的關系是已知的,只要找出相同物體(楓葉)在不同畫面中的位置,我們就能通過算法計算出這個物體(楓葉)距離攝像頭的深度了。
多角成像是三維手勢識別技術中硬件要求最低,但同時是最難實現的。多角成像不需要任何額外的特殊設備,完全依賴于計算機視覺算法來匹配兩張圖片里的相同目標。相比于結構光或者光飛時間這兩種技術成本高、功耗大的缺點,多角成像能提供“價廉物美”的三維手勢識別效果。


評論