前饋-改進PID算法在智能車控制上的應(yīng)用

 本文引用地址:http://www.104case.com/article/197879.htm
本文引用地址:http://www.104case.com/article/197879.htm圖3 微分先行PID控制結(jié)構(gòu)圖
3 前饋控制的應(yīng)用
由于智能車的跑道寬度有限制,所以在經(jīng)過急轉(zhuǎn)彎的時候,如果速度和方向控制不及時,智能車就可能沖出跑道。由于前饋控制是開環(huán)控制,所以前饋控制的響應(yīng)速度很快。將前饋控制引入到智能車的控制中,能夠提高舵機和伺服電機的反應(yīng)速度,改善智能車系統(tǒng)的動態(tài)性能。
3.1 智能車控制系統(tǒng)結(jié)構(gòu)
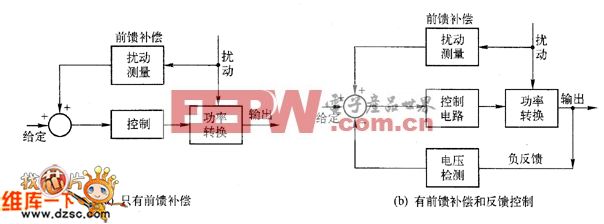
智能車的控制主要體現(xiàn)在兩個方面:一方面是方向的控制,也就是對舵機的控制;另一方面是對速度的控制,也就是對伺服電機的控制。舵機的數(shù)學(xué)模型較為簡單,具有很好的線性特征,只采用前饋控制;智能車的速度控制相對復(fù)雜一些,速度模型無法準確建立,采用前饋-改進PID算法進行控制。智能車的控制系統(tǒng)結(jié)構(gòu)如圖4所示。
圖4中, 和 分別是舵機和伺服電機數(shù)學(xué)模型。從圖中可以看出,智能車的方向控制和速度控制是相互獨立的,而且它們都是由路線偏差決定的。舵機轉(zhuǎn)角與路線偏差之間的對應(yīng)關(guān)系是根據(jù)舵機的數(shù)學(xué)模型得到的,在速度控制回路中,既包括反饋回路,又包括前饋環(huán)節(jié),伺服電機的控制量是在前饋補償基礎(chǔ)上,再由增量式PID算法計算得到。
圖4 智能車的控制系統(tǒng)結(jié)構(gòu)
3.2 在方向控制中的應(yīng)用
智能車對方向的控制有兩點要求:在直道上,方向保持穩(wěn)定;在轉(zhuǎn)彎處,需要方向變化準確而且迅速。只有這樣,才能保證智能車在跑道上高速、穩(wěn)定地運行。為了提高方向控制的魯棒性,本文還對路線偏差進行了模糊化處理。圖5是智能車方向模糊前饋控制的結(jié)構(gòu)圖,圖中和分別是直道和彎道兩種情況下的前饋控制函數(shù)。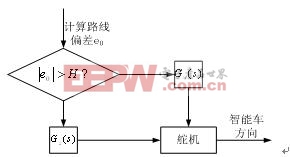
圖5 智能車方向控制系統(tǒng)結(jié)構(gòu)圖
3.3 在速度控制中的應(yīng)用
為了使智能車在直道上以較快速度運行,在轉(zhuǎn)彎時,防止智能車沖出跑道,則必須將智能車的速度降低,這就要求智能車的速度控制系統(tǒng)具有很好的加減速性能。當智能車經(jīng)過連續(xù)轉(zhuǎn)彎的跑道時,路線偏差的頻繁變化會造成速度設(shè)定的頻繁變化,這會引起速度控制系統(tǒng)的振蕩,并且微分環(huán)節(jié)對誤差突變干擾很敏感,容易造成系統(tǒng)的不穩(wěn)定。為了解決上述存在的問題,本文對數(shù)字PID算法進行了改進,將不完全微分和微分先行引入到PID算法中,大大改善了速度控制系統(tǒng)的動態(tài)性能。
圖6 智能車速度控制系統(tǒng)結(jié)構(gòu)圖









評論