前饋-改進PID算法在智能車控制上的應用

1 引言
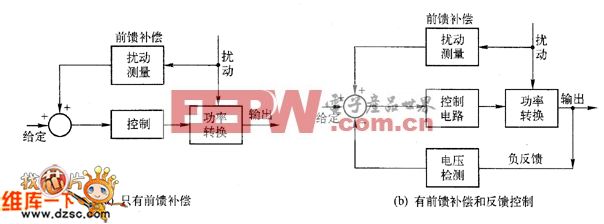
智能車系統是一個時變且非線性的系統,采用傳統PID算法的單一的反饋控制會使系統存在不同程度的超調和振蕩現象,無法得到理想的控制效果。本文將前饋控制引入到了智能車系統的控制中,有效地改善了系統的實時性,提高了系統的反應速度[1];并且根據智能車系統的特點,對數字PID算法進行了改進,引入了微分先行和不完全微分環節,改善了系統的動態特性;同時,利用模糊控制具有對參數變化不敏感和魯棒性強的特點[2],本文將模糊算法與PID算法相結合,有效地提高了智能車的適應性和魯棒性,改善了系統的控制性能。
2 改進PID算法
智能車的控制是由飛思卡爾公司的S12芯片完成,所以對智能車的控制要采用計算機控制方法。本文針對智能車控制的特殊性,對傳統數字PID算法做了一些改進,這樣可以更好地滿足智能車控制的需要。
2.1不完全微分PID
將微分環節引入智能車的方向和速度控制,明顯地改善了系統的動態性能,但對于誤差干擾突變也特別敏感,對系統的穩定性有一定的不良影響。為了克服上述缺點,本文在PID算法中加入了一階慣性環節[3] ,不完全微分PID算法結構如圖1所示。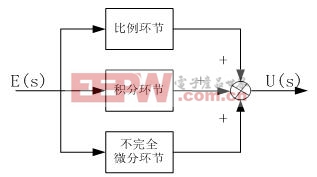
圖1 不完全微分PID算法機構圖
將一階慣性環節直接加到微分環節上,可得到系統的傳遞函數為: (1)
(1)
將(1)式的微分項推導并整理,得到方程如下: (2)
(2)
式中, ,由系統的時間常數 和一階慣性環節時間常數 決定的一個常數。
為了編程方便,可以將2-2式寫成如下形式:
 (3)
(3)
式中, 。
。
分析式(3)可知,引入不完全微分以后,微分輸出在第一個采樣周期內被減少了,此后又按照一定比例衰減[3][4]。實驗表明,不完全微分有效克服了智能車的偏差干擾給速度控制帶來的不良影響,具有較好的控制效果。圖2為不完全微分PID算法的程序流程圖。
2.2 微分先行PID
由于智能車在跑道上行駛時,經常會遇到轉彎的情況,所以智能車的速度設定值和方向設定值都會發生頻繁的變化,從而造成系統的振蕩。為了解決設定值的頻繁變化給系統帶來的不良影響,本文在智能車的速度和方向控制上引入了微分先行PID算法,其特點是只對輸出量進行微分,即只對速度測量值和舵機偏轉量進行微分,而不對速度和方向的設定值進行微分。這樣,在設定值發生變化時,輸出量并不會改變,而被控量的變化相對是比較緩和的,這就很好地避免了設定值的頻繁變化給系統造成的振蕩,明顯地改善了系統的動態性能。
圖3是微分先行PID控制的結構圖,微分先行的增量控制算式如下。 (4)
(4)
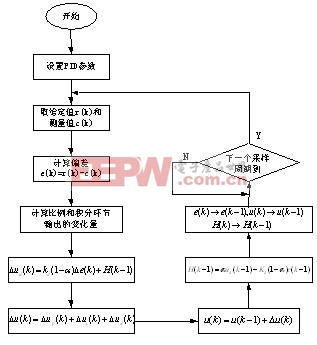
圖2 不完全微分PID算法的程序流程圖









評論