汽車電力載波總線系統(tǒng)的應用設計

目前,現(xiàn)行的汽車總線標準很多,其中使用比較廣泛的有CAN總線、J1850等。這些總線都要采用專門的數(shù)據(jù)線束,且汽車的ECU單元對數(shù)據(jù)傳輸?shù)囊蟛灰恢拢枰?a class="contentlabel" href="http://www.104case.com/news/listbylabel/label/汽車">汽車內(nèi)同時布置幾個不同的數(shù)據(jù)網(wǎng)絡。另外,這些數(shù)據(jù)總線的實現(xiàn)又需要布置專用的數(shù)據(jù)通信線束,這樣增加了汽車內(nèi)的線束、制造成本和維護難度,給汽車內(nèi)的數(shù)據(jù)傳輸帶來不穩(wěn)定的因素。本文介紹一種新的汽車總線數(shù)據(jù)傳輸方式――汽車電力載波總線數(shù)據(jù)通信技術,該方式在不增加汽車內(nèi)線束的基礎上可實現(xiàn)汽車內(nèi)各ECU模塊之間的數(shù)據(jù)傳輸和共享。
本文引用地址:http://www.104case.com/article/197857.htm1 系統(tǒng)總線通信信道模型分析

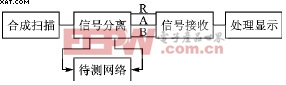
與低壓電網(wǎng)載波通信系統(tǒng)一樣,汽車電力線載波系統(tǒng)的負載也是復雜和時變的。各種類型的電器有時接通,有時斷開,使得導線的阻抗特性具有很大的波動性,系統(tǒng)的傳遞函數(shù)隨負載的變化隨時發(fā)生改變,是一個時變系統(tǒng)。圖1所示的時變通信信道模型,可以用來表述汽車電力線載波總線系統(tǒng)。圖中,除了噪聲干擾被表示為加性的隨機干擾過程外,系統(tǒng)中其他的部分都以相應的頻率響應函數(shù)表示。通信系統(tǒng)中的傳遞函數(shù)以及噪聲模型可以通過測量得到,也可以通過理論分析得到。這個系統(tǒng)模型比較全面地概括了通信系統(tǒng)設計時所必須考慮的重要特性。
|
圖2 網(wǎng)絡分析儀結構框圖 對于汽車電力線載波通信信道,其頻率響應是一個緩慢變化的隨機過程。這個隨機過程可以看成是一個方差為σ2的白噪聲經(jīng)過一個因果穩(wěn)定濾波器的輸出。正確地選擇這個濾波器的系數(shù),就能把這個隨機過程用有限的參數(shù)表示出來。把已經(jīng)獲得的數(shù)據(jù)送入計算機處理、分析方差的變化開始變緩,可以確定系統(tǒng)頻率響應,用3個系數(shù)和1個白噪聲的方差表示為:按此在新窗口瀏覽圖片。根據(jù)模型系數(shù)的統(tǒng)計特性認為,通信信道的頻率響應應該是白噪聲隨機過程經(jīng)過AR模型系數(shù)所構成的濾波器后的輸出,可以通過計算機編制程序來產(chǎn)生信道的頻率響應。這里假定系數(shù)都是獨立的高斯隨機變量,仿真結果如圖3所示。
本文在大量實驗測量的基礎上,在500 kHz~10 MHz頻帶上對汽車電力線載波通信信道的傳輸特性進行了研究,并用隨機信號處理方法建立了信道幅頻特性的3階自回歸模型,得到以下結論: ① 汽車電力線載波通信信道不存在通常低壓電力線載波通信信道都會遇到的多孔徑傳輸?shù)膯栴}。 2 系統(tǒng)設計
根據(jù)系統(tǒng)總線通信信道模型分析,汽車電力載波總線采用汽車載波通信標準和協(xié)議;同時,結合汽車內(nèi)各電器對數(shù)據(jù)傳輸速率要求的實際情況,組建不同數(shù)據(jù)速率的汽車線束載波通信網(wǎng)絡。高速載波通信網(wǎng)絡將汽車內(nèi)需要高數(shù)據(jù)傳輸速率 的模塊連接在一起,而對速率要求不高的電器模塊則使用低速通信網(wǎng)絡。這樣,汽車內(nèi)的所有電器就可以通過很少的幾根電力線束分別連接在一起,組成幾個子系統(tǒng)。這些子系統(tǒng)之間通過網(wǎng)間連接器(網(wǎng)關)實現(xiàn)信息共享,達到汽車各電器模塊的協(xié)同動作,實現(xiàn)汽車智能控制。圖4是汽車載波通信的網(wǎng)絡拓撲結構原理框圖。在這種拓撲結構的汽車載波通信系統(tǒng)中,各電器模塊與載波通信模塊之間的連接采用新的汽車載波通信總線標準。 本設計中的汽車載波通信系統(tǒng)采用主從結構,整體的網(wǎng)絡結構呈樹狀分布。系統(tǒng)中包括一個主控制模塊和多個從控制模塊。從網(wǎng)絡拓撲結構的角度來看,整個通信系統(tǒng)就是由主控制模塊、汽車電力線束以及從控制模塊組成,在系統(tǒng)中汽車電力線束同時也起到了通信信道的作用。圖5顯示了連接在汽車內(nèi)載波通信系統(tǒng)中的主控制模塊與電動門窗及電動椅等負載的連接情況。控制信息通過汽車電力線束,在各個控制模塊之間傳輸。
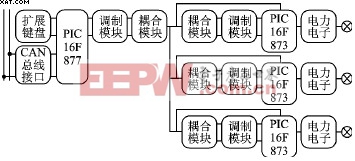
采用載波通信技術的智能汽車照明控制系統(tǒng)包括主控制模塊及從控制模塊。圖6為系統(tǒng)控制單元連接框圖。從圖中可以看出,除了外部接口外,主控模塊與從控模塊之間沒有太大的差別。它們都包括有CPU模塊、調(diào)制解調(diào)模塊、耦合模塊。這些都是進行載波通信所必需的單元。下面將詳細論述這幾部分模塊的具體實現(xiàn)。
圖6 系統(tǒng)控制單元連接框圖 各個控制單元系統(tǒng)采用了PIC系列單片機,主控制單元采用的是PIC16F877,而從控制單元采用的則是PIC16F873。 PIC(Peripheral InteRFace Controller,外圍接口控制器),是由美國Microchip公司推出的單片機系列。 3.1 主控制單元的具體實現(xiàn) 下面以主控制單元中CPU模塊的具體應用為主,介紹系統(tǒng)中CPU的具體實現(xiàn)。圖7所示為主控制單元CPU模塊的控制連接電路。 關鍵詞:
汽車
電力載波
總線系統(tǒng)
應用設計
相關推薦技術專區(qū) |













評論