基于ARM的車載導航系統(tǒng)的研究與設計

2 軟件設計
該導航系統(tǒng)的軟件開發(fā)是在ADS 1.2開發(fā)環(huán)境下完成的。軟件主要采用C語言編寫,在整體編譯調試通過和運行正常后,使用ADS 1.2開發(fā)環(huán)境中的片上調試功能,將源程序燒錄到FLASH,這樣將JTAG和電源斷開重新上電后,程序就可以脫機運行了。圖5是主線程的軟件流程圖。
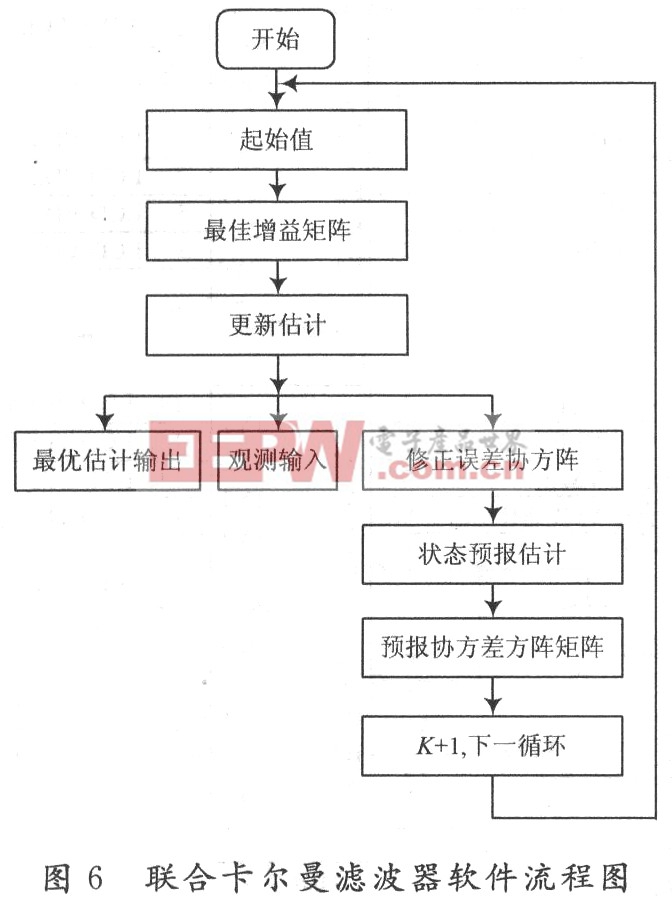
將GPs接收機的輸出信息與DR系統(tǒng)所得的距離變化量d和航向角θ信息傳送到嵌入式S3C4480中,首先利用相應的軟件進行兩套數(shù)據(jù)的時空同步,然后利用卡爾曼濾波器進行組合處理。有關校正計算,可以在計算機上實現(xiàn),無需反饋回子系統(tǒng)。組合處理GPS和DR數(shù)據(jù),可以實時進行,也可以測量后實施。圖6是聯(lián)合卡爾曼濾波器的軟件流程圖。本文引用地址:http://www.104case.com/article/197821.htm
3 結 語
基于ARM7采用GPS/DR組合導航系統(tǒng)來克服單獨采用GPS信號易丟失和航位推算DR的缺點,通過數(shù)據(jù)濾波處理和信息融合算法,使得定位誤差遠遠小于單獨GPS系統(tǒng),同時也彌補了DR系統(tǒng)誤差發(fā)散的特點,最終在彩色LCD(LFUBK909A)上顯示出來。實驗結果證明了該組合是行之有效的。











評論