基于CAN總線的汽車車身控制系統的研究與應用

科學的發展使得汽車正增加著越來越多的功能,如何使這些眾多的獨立功能協調統一工作,亦即如何對整個車身進行控制,已經成為整個汽車電子研究領域中非常重要的課題。汽車網絡,即汽車總線技術在這種環境下應運而生了。而CAN 總線技術以其高實時性、高可靠性在各種汽車控制總線中獨占鰲頭。
本文引用地址:http://www.104case.com/article/197820.htm1 CAN 總線技術簡介
CAN,全稱為“Controller Area Network”,即控制器局域網,是國際上應用最廣泛的現場總線之一。CAN 最初出現在80 年代末的汽車工業中,由德國Bosch 公司最先提出。CAN 是一種多主方式的串行通訊總線,基本設計規范要求有高的位速率,高抗電磁干擾性,而且能夠檢測出產生的任何錯誤。當信號傳輸距離達到10km 時,CAN 仍可提供高達50Kbit/s 的數據傳輸速率。目前CAN 總線已經形成國際標準,廣泛應用于歐美轎車,被公認為幾種最有前途的現場總線之一。
2 系統設計思想
汽車車身系統的控制對象包括: 4 個車門鎖、2 個以上車窗玻璃升降器、行李箱鎖、除霜加熱器、電動后視鏡、前后大燈、小燈、轉向燈、危險燈、霧燈、牌照燈、車內閱讀燈、車廂頂燈等。在具備遙控功能的情況下,還包括對遙控信號的接收處理和防盜系統的控制。因此,根據以上要完成的各功能,將本系統設計為 5 個子模塊,分別是中央控制模塊( 實現中控門鎖、防盜、雨刮、內外燈和后窗及后視鏡加熱等功能) ,4 個門控模塊( 分別為主駕門模塊、右前門模塊、左后門模塊、右后門模塊,來控制車窗升降器和門鎖)。
圖1 給出了車身控制模塊CAN 總線結構。
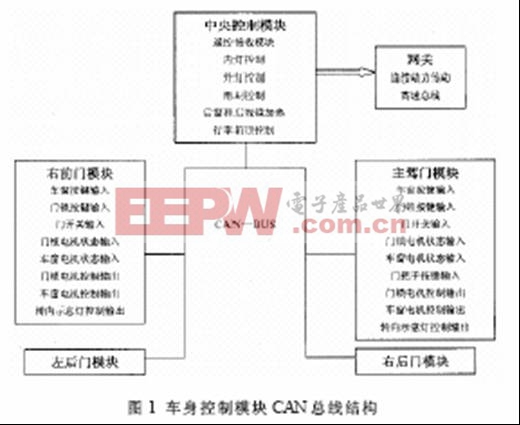
3.1 系統各模塊電路框圖
根據以上設計思想分為5個子模塊。
主控單元接收開關信號之后,先進行分析處理,然后通過CAN總線把控制指令發送給各受控端,各受控端響應后作出相應的動作。











評論