基于J1939協議的汽車總線培訓實驗系統

隨著汽車電子技術的發展,汽車上越來越多地采用了各種復雜的電子設備。為了提高信號的利用率,要求大量的數據信息能在不同的ECU中共享,大量的控制信號能夠實時交換, 而傳統線束已遠遠不能滿足這種需求。CAN總線和基于它的車輛網絡通信標準提供了解決上述問題的途徑。[1] SAE J1939協議是美國汽車工程師協會發布的以CAN總線為核心的車輛網絡串行通訊和控制協議,供卡車及其拖車、大客車、建筑設備以及農業設備使用,是用來支持分布在車輛各個不同位置的電控單元之間實現實時閉環控制功能的高速通信標準,數據傳輸速率為250Kb/s,通信物理層和數據鏈路層以CAN2.0為基礎,并定義了網絡層和應用層的協議。[2-3]
針對J1939協議教學和培訓要求,構建了一個基于J1939協議的汽車教學實驗系統。系統實時監控汽車CAN總線的數據并能完整記錄、顯示波形和打印。
1 系統原理及硬件結構
1.1系統原理
系統中,CAN總線模塊系統通過CAN總線分析儀與計算機通訊,實行數據采集和傳輸,用于教學和培訓。學生進行實驗操作,直觀了解數據收發,掌握CAN總線和J1939協議的特點,理解物理層、數據鏈路層和應用層的含義和作用,最后進行系統開發。
CAN總線模塊系統能采集卡車道路行駛狀態數據,同時能控制車燈、門窗電機、電磁閥等功率設備。其中,儀表板模塊通過與車身通用控制模塊、車窗控制模塊進行CAN通訊,采集車輛開關狀態,通過LED燈、液晶屏、轉盤指針顯示整車狀態、故障信息、報警信息等各種信息,實現人機交互,對卡車進行實時控制。
1.2 系統硬件組成
系統包括3個部分:基于J1939的汽車CAN總線模塊系統,包括儀表板模塊、車身通用模塊、車身專用模塊(車窗控制模塊);CAN總線分析儀,包括由基于USB的Kvaser USB CANⅡ總線適配器和軟件Warwick X-Analyser組成;筆記本電腦(計算機)。
系統硬件結構示意圖,如圖1所示:
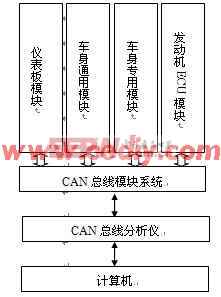
圖1 系統硬件結構圖
2 系統硬件
基于J1939的汽車CAN總線模塊系統中,儀表板具有整車參數的顯示、存儲,與發動機ECU通信的功能,同時實現對負載的過程控制,根據儀表板上的開關狀態及連接在車身通用控制模塊的開關和傳感器狀態,產生功率輸出,并與車身通用控制模塊通訊;車身通用控制模塊負責將所屬區域的開關和傳感器狀態通過CAN總線反饋給儀表板模塊,并接收控制指令,驅動功率輸出接口實現通斷控制。
實車上的儀表板控制器位于駕駛室司機座位正前方;前部控制模塊位于駕駛室司機座位與副駕駛座位之間的操作臺下;車身通用模塊位于車架上;車窗控制模塊位于駕駛室司機座位與副駕駛座位之間的操作臺下。







評論