基于機器視覺的車道偏離預警系統的實現

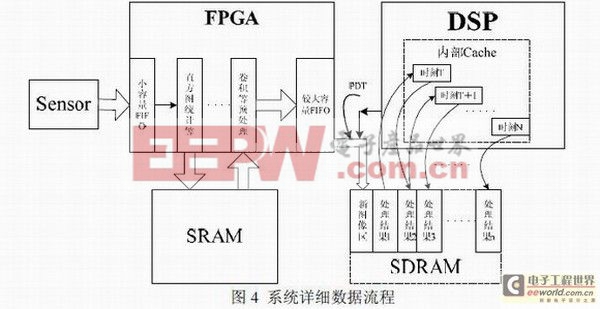
完成了前端預處理模塊到主存儲器 SDRAM 的數據搬移過程,接下來主要是后端的高速數據傳輸過程。DSP 與SDRAM 之間的數據傳輸可達到100MHz 以上的高速速率,尤其是DSP 支持的EDMA 傳輸方式,更是允許不在CPU 干涉的情況下,就可完成外部數據與DSP 內部的Cache 之間的傳輸,這樣可提高CPU 工作的效率。另外,DSP 芯片內部有兩級的緩存,第二級緩存L2 更是可達到1MB,因此我們考慮采用現在流行的ping-pong 傳輸方式,當CPU 在處理緩存中的ping 或pong 內部的數據時,在可以預測剩余處理時間的前提下,我們可預先將接下來要處理的數據通過EDMA 方式傳輸到對應的pong 或ping 存儲區中,這樣便將數據傳輸的時間蘊含在了處理過程中,節省了相應的傳輸時間,提高了效率。
綜合了上面對整個數據傳輸流程的分析,我們可以得出如圖4 所示的數據搬移過程。由圖中可以看出,從Sensor 出來的數據到FPGA 中的預處理,與DSP 內部的數據處理過程,在SDRAM 的緩存處理下,是可以以流水線的方式傳輸處理的,FPGA 作為前端預處理模塊,完成大容量數據的處理過程,對于系統效率的提高具有非常大的作用。
3、系統軟件算法
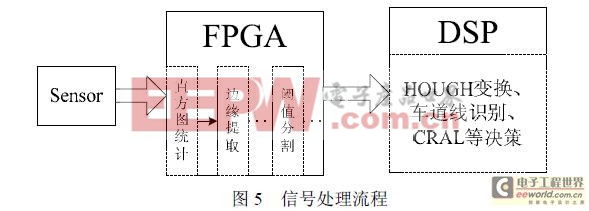
關于前端圖像預處理方法及車道偏離決策算法的介紹性文章比較多[2][3][4],在本文中就不做過多的描述,主要的實現流程如圖5所示。通過 [2]中的一些典型算法,我們驗證了本文所設計的汽車主動安全系統是完全滿足汽車駕駛這種應用條件下的實時性要求的,而且該系統是具有較強的擴展性的。
4、結論
本文詳細介紹了一套基于 DSP 計算和FPGA 邏輯計算的車道偏離預警系統的實現方案,主要解決了大容量圖像數據在系統中的高速傳輸和存儲、處理等。在設計的過程中,本文充分運用了FPGA 的邏輯資源對底層視覺算法的適應性及DSP 芯片的高速處理能力來滿足高層的串行度高的視覺算法。通過一系列的實驗,驗證了該系統滿足汽車安全這種應用背景下的高實時性要求。
本文創新點:
(1) 結合駕駛員、汽車與道路環境的關系,模擬人的駕駛行為來設計汽車主動安全系統,在系統設計的原理上更有現實意義;
(2) 針對計算機視覺系統設計中對多個層次算法的適應性,采用DSP 計算和FPGA 邏輯計算相結合的方式,滿足系統算法各個層次的要求;
(3) 對計算機視覺系統中數據傳輸、存儲和處理的流程進行了詳細的分析,采用優化的EDMA 傳輸方式-PDT 來滿足系統實時性的要求;




評論