基于MC9S12XSl28微控制器的智能車硬件設計

1.3 MC9S12XSl28單片機簡介
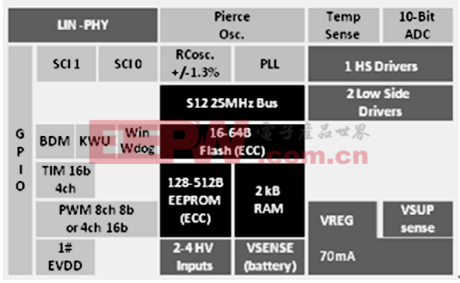
本設計選用飛思卡爾MC9S12XSl28微控制器作為控制單元。該系統板具有MCU核心系統,支持串口調試下載,具有擴展接口,可進行2次開發,支持μCOSⅡ。此開發板兼容性較高,監控程序功能強大,可提供各種基本的開發和調試功能,如程序的下載和運行、斷點設置、內存顯示等。還可利用MC9S12XSl28的Flash在線編程技術實現在線寫入用戶程序和隨時修改Flash存儲內容。同時在線實時仿真和監測自編程序。根據實際設計需要分配控制器內部單元,如表l所示。本文引用地址:http://www.104case.com/article/197708.htm

2 各功能模塊的設計與實現
智能車硬件系統主要包括電源、電機驅動、測速、舵機、圖像采集與處理等部分。
2.1 電源模塊設計
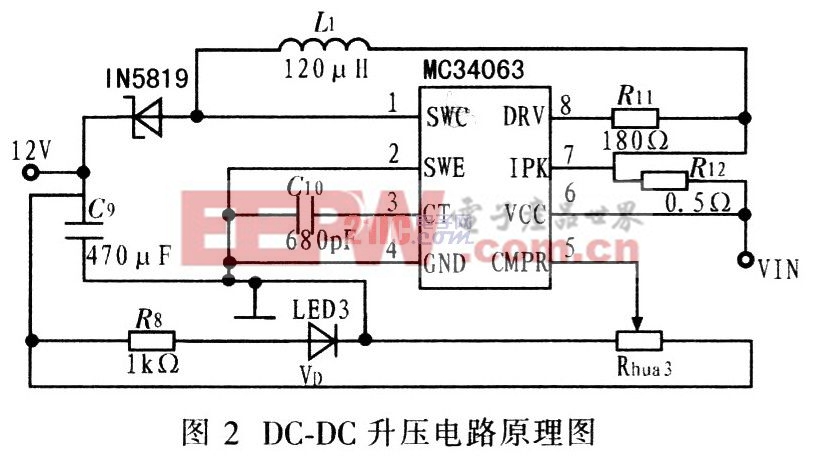
根據智能車的設計需求,需提供5 V電源為單片機、SD卡、測速模塊、PCB板上電路、無線通訊模塊等供電:6 V電源供給舵機,CCD攝像頭需12 V的工作電壓。其中的難點是12 V DC-DC升壓電路。這里使用MC34063A搭建由7.2 V升壓到12 V的升壓電路。MC34063A是單片雙極型線性集成電路,專用于直流一直流變換器控制,內置占空比周期控制振蕩器、驅動器和大電流輸出開關,可輸出1.5 A的開關電流。它能使用最少的外接元件構成開關式升壓變換器,降壓式變換器和電源反向器。圖2為DC-DC升壓電路原理圖。
2.2 電機及舵機驅動模塊設計
影響智能車速度的最關鍵因素是驅動力。“驅動力”不僅包括驅動電機,還包括電機驅動電路。電機驅動電路要能為賽車提供強大的動力,同時自身的功耗要小,能夠保證在長時間大電流輸出的情況下不升溫且持續穩定工作。
根據PWM調速電機驅動電路的性能指標。在實際制作過程中,主要采用以下兩種方案:1)采用MC33886級聯組成驅動電路;2)采用MOSFET搭建H橋電路。

pid控制器相關文章:pid控制器原理

評論