基于MC9S12XSl28微控制器的智能車硬件設計

摘要:以“飛思卡爾”杯智能車大賽為研究背景,采用MC9S12XSl28作為核心處理器,通過對比各個模塊不同設計方案的性能,完成智能車電源、驅動、圖像采集、測速等模塊的設計與實現。通過大量的實驗調試完成了智能車的組裝與機械部分調整,使得智能車結構更為合理。實驗及實際比賽表現表明,該智能車硬件結構穩定,性能良好。
關鍵詞:電源設計;電機驅動;圖像采集;二值化電路;MC9S12XSl28
隨著汽車電子業的迅猛發展,智能車作為電子計算機等最新科技成果與現代汽車工業相結合的產物,因其具有的智能特點而成為研究重點。“飛思卡爾”杯全國大學生智能汽車比賽在此背景下產生,競賽規則規定。賽車在設定的賽道上能夠自主行駛,并以最短的時間跑完全程者獲勝。因此,智能車硬件不斷創新以適應小車的速度要求。本文以MC9S12XSl28為核心處理器,通過實驗比較智能車各個模塊電路設計方案,從而設計出性能穩定的硬件電路,經大賽實際檢驗性能良好穩定。
1 系統整體方案設計
1.1 智能車功能設計
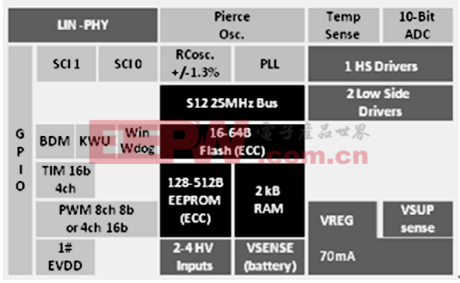
根據大賽規則,智能車應具有路徑識別、方向控制、速度控制、狀態檢測等功能,設計采用大賽指定的飛思卡爾16位微控制器MC9S12X-Sl28單片機作為核心控制單元,利用CCD攝像頭作為識別路徑的傳感器,經MC9S12XSl28 MCU的I/O端口處理,控制賽車的運動決策,同時內部ECT模塊發出PWM波,驅動直流電機及舵機對智能車進行速度控制和轉向控制,為了精確控制賽車的速度,在智能車后軸上安裝光電編碼器,采集車輪轉速的脈沖信號,經MCU捕獲后進行PID自動控制,完成智能車速度的閉環控制。設計中應注意的原則:重心盡可能低、體積盡可能小、驅動盡可能大、結構盡可能簡單。
1.2 系統整體結構
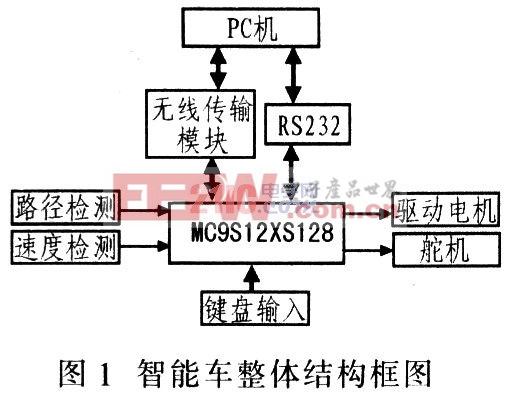
智能車的硬件設計是整個系統設計的基礎,只有在系統硬件設計可行、穩定、可靠的前提下,其他控制方案才能得以繼續。系統硬件主要包括單片機(主控)、CCD攝像頭(圖像采集)、旋轉編碼器(速度檢測)、SD卡(大量數據存儲)、無線抄表(數據的無線收發)、直流電機(速度控制)、舵機(方向控制)、電源(5 V/6 V/7 V/3.3V/9 V/12 V)、車模、驅動器MC33886、MOSFET管等組成。圖1為其整體結構框圖。

pid控制器相關文章:pid控制器原理

評論