基于異構多核體系的汽車遠程監控系統設計

3 系統軟件設計
3.1 系統的軟件層
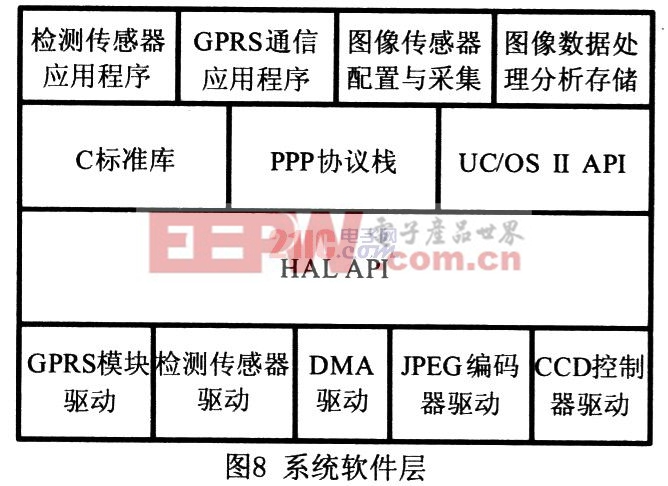
系統的驅動程序都是基于HAL層的方式編寫,包括:GPRS通信模塊的驅動、檢測傳感器驅動、DMA驅動、JPEG編碼器驅動、CCD控制器驅動。主核NlOS II Corel上運行UC/OS II完成多任務的調度,PPP協議棧完成網絡傳輸功能。所有應用程序在操作系統的管理下工作,包括對檢測傳感器信號的采集應用程序、GPRS通信功能、圖像傳感器配置與采集、圖像數據處理分析存儲等。其軟件層圖如圖8所示。
3.2 UC/OS ll操作系統的多任務設計
為保證系統軟件的實時性,在Nios II Corel上運行UCOSⅡ實時操作系統,同時方便地管理系統多任務運行。這里設計7個任務和兩個中斷,任務以及中斷間的通信通過信號量、郵箱、全局變量等實現。任務及中斷間的關系如圖9所示。
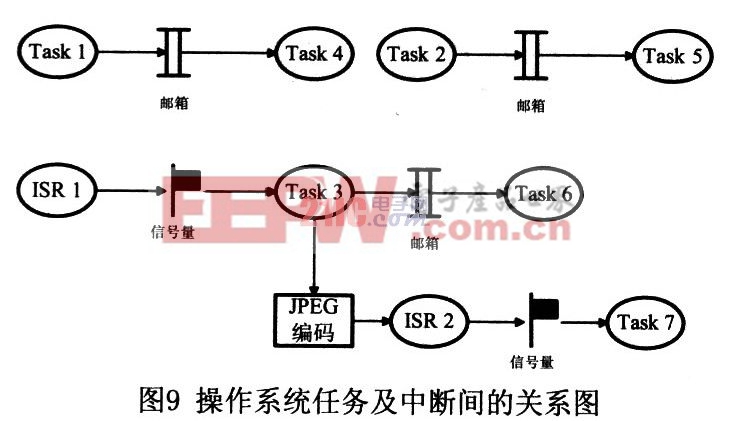
Taskl:X/Y方向加速度、傾角信號采集計算及判斷;
Task2:震動能量信號的采集計算及判斷:
Fask3:運動目標檢測結果采集;
Task4:X/Y方向加速度、傾角提示短信發送:
Task5:震動能量提示短信發送;
Task6:運動目標檢測結果短信發送;
Task7:JPG彩信發送:
ISR1:Nios II Core2發送來檢測到運動目標消息;
ISR2:JPEG編碼完成:
4 結束語
本方案通過汽車傳感器采集板采集信號,計算出X/Y方向加速度、傾角、震動能量,當超過所設定閾值時通過GPRS無線模塊發送信息給客戶端。CMOS攝像頭D5M完成視頻圖像的采集,做Sobel算子邊緣檢測圖像預處理,通過VGA實時輸出監控。對連續兩幀的信號做運動目標檢測,當檢測到運動異物時以短信提示用戶,同時拍攝下此時的照片,對照片進行JPEG圖像壓縮,進行GPRS彩信發送與客戶端。其設計特點為實時性強、誤報率低、傳輸速度快、穩定性好等,具有很好的實用性。











評論