基于模糊控制的汽車燈光隨動系統仿真

3 燈光隨動系統模糊控制器設計原理
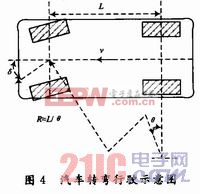
如圖4所示:當汽車轉過很小的角度時,其轉動半徑R近似地等于L和轉動角度δ的比值,通過車速傳感器的數據很容易計算出行駛的距離L,通過方向盤傳感器檢測到的信號也容易得出δ的值,這樣就很容易求出轉動半徑R的值。而且,根據實際經驗可知,燈的轉向和汽車行駛的半徑R的關系最大。因此,可根據R值的變化對汽車車燈的轉向進行模糊控制。首先定義R,如果為正值,說明為逆時針轉動,負值為順時針轉動;另外定義θ為正,說明為左邊燈向左轉動度數,負值為右邊燈向右轉動度數。
4 汽車燈光隨動系統仿真及結果
本系統的模糊設計器采用Matlab模糊工具箱設計模糊控制器。
在Madab中鍵入FUZZY,進入模糊邏輯編輯窗口FIS Editor,如圖5所示。可以對輸入和輸出的隸屬函數進行編輯。
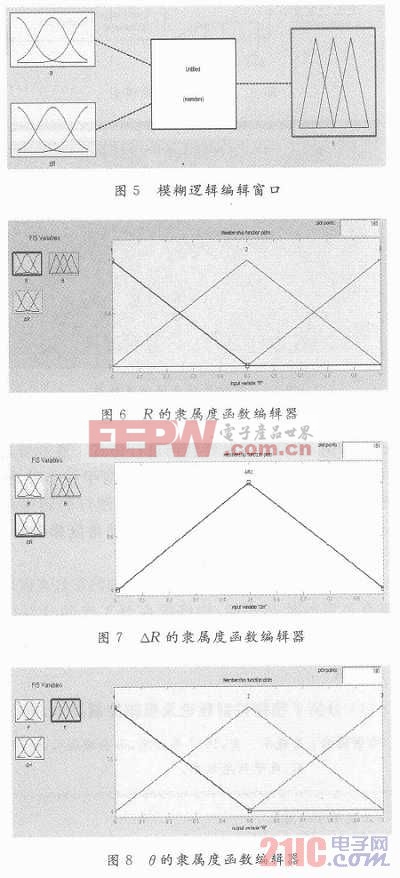
如圖6所示,R的論域為[0,1],有三個語言變量,三角形隸屬度函數。
如圖7所示,△R的論域為[0,1],有一個語言變量,三角形隸屬度函數。
如圖8所示,輸出θ的論域為[O,1],有三個語言變量,三角形隸屬度函數。
在Rulers Editor窗口中輸入控制前照燈轉向的3條模糊控制規則:











評論