LIN總線及其在汽車分級制網(wǎng)絡(luò)中的應(yīng)用

一個完整的報文幀如圖2所示。
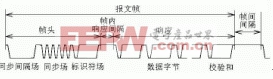
圖2LIN報文幀
根據(jù)傳輸條件的不同,報文幀可分為絕對幀、觸發(fā)幀、離散幀、診斷幀、用戶定義幀和保留幀六種[2]。LIN總線上的所有通訊都由主機節(jié)點中的主機任務(wù)發(fā)起,主機任務(wù)根據(jù)進度表來確定當前的通訊內(nèi)容,發(fā)送相應(yīng)的幀頭,并為報文幀分配幀通道。總線上的從機節(jié)點接收幀頭之后,通過解讀標識符來確定自己是否應(yīng)該對當前通訊做出響應(yīng)、做出何種響應(yīng)。基于這種報文濾波方式,LIN可實現(xiàn)多種數(shù)據(jù)傳輸模式,且一個報文幀可以同時被多個節(jié)點接收利用,如圖3所示。
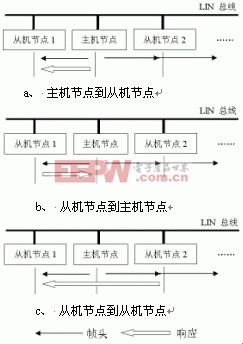
圖3LIN數(shù)據(jù)傳輸模式
3.3總線睡眠和喚醒
需要時可由主機節(jié)點發(fā)送一個標識符為0x3C且數(shù)據(jù)場中首字節(jié)為0的診斷幀將所有從機節(jié)點置為睡眠狀態(tài),如果總線在4秒鐘以上沒有任何活動,從機節(jié)點也自動進入睡眠狀態(tài),以減小功耗。
處于睡眠狀態(tài)的LIN網(wǎng)絡(luò)中的任何一個節(jié)點都可以請求喚醒總線,總線上的所有節(jié)點在接收到喚醒請求后應(yīng)脫離睡眠狀態(tài)并為接收總線命令做好準備。主機節(jié)點接收到喚醒請求后也被喚醒,并在從機節(jié)點準備好之后發(fā)送幀頭,尋找喚醒原因。
3.4錯誤檢測和處理
LIN規(guī)范定義了六種不同類型的報文錯誤:位錯誤、校驗和錯誤、標識符錯誤、從機不響應(yīng)錯誤、總線不活動錯誤和同步場不一致錯誤。主機節(jié)點和從機節(jié)點分別檢測這六種錯誤中的若干種。
4.LIN應(yīng)用設(shè)計
LIN是一種低速串行總線,其提出是針對汽車應(yīng)用的,主要用于汽車電子控制系統(tǒng),實現(xiàn)智能傳感器、執(zhí)行器等的連接。LIN定位于汽車上的下層局部網(wǎng)絡(luò)。由CAN構(gòu)成汽
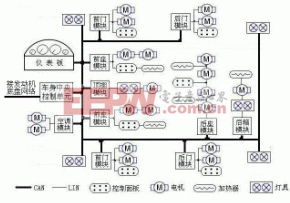
圖4基于CAN/LIN的分級制汽車網(wǎng)絡(luò)











評論