主動前輪轉向控制技術研究

在主動轉向防側翻的控制中,由于附加轉角的存在,會影響車輛按照駕駛員意圖行駛的能力,因此控制策略中應由一個關于汽車行駛時車道保持能力的控制方法,如采用主動制動的方法。由于車輛側翻的危害性比較大,因此這類控制一般都遵循了側翻控制優先于車道跟隨的原則。
2.4 可變轉向傳動比的控制
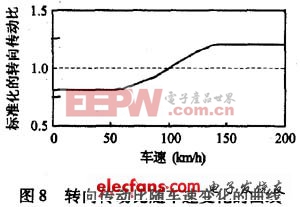
操縱穩定性實際上是一個人車路閉環系統的特性,操縱穩定性的好壞最終決定于駕駛員感受,因而在主動前輪轉向的控制中,如何提高駕駛員操縱的安全性和舒適性也成為提高系統操縱穩定性的一個重要因素。在傳統汽車上,從方向盤到車輪的傳動比是一個定值。在低速時,車輛如在泊車停靠等工況下,或者由于障礙物而突然變道時,需要駕駛員大幅、快速操縱方向盤,增加了駕駛員的身體負擔。相反,在高速時,由于車輛轉向響應增益加大,較小的方向盤轉角就會產生較大的側向加速度,增加了駕駛員的精神負擔。可變轉向傳動比可有效地解決上述問題。一般來說,變轉向傳動比控制中轉向傳動比的變化主要取決于兩方面的因素:車速和方向盤轉角。隨著車速的升高,轉向傳動比增加,隨著方向盤轉角的增大,轉向傳動比減小,如圖8所示。這樣,可以使得駕駛員在低速時轉向輕便而高速時操縱穩定。在目前的主動前輪轉向控制中,許多控制算法都把可變轉向傳動比控制作為一個前饋環節,同反饋環節一起改善車輛的操縱穩定性。在機械式主動轉向系統中,可變傳動比是通過轉角疊加的方式實現的,其輸入、輸出關系如下:
式中:Wsw為方向盤輸入轉角,Wring為主動齒輪輸入轉角,α1、α2為兩者疊加的比例系數。
3 主動前輪轉向動力學控制展望
由于車輛橫擺角速度和側向加速度通過輪胎的側向力耦合,利用主動轉向通過側向力來改善車輛的操縱穩定性必然面臨無法解決的矛盾,即側向加速度與橫擺角速度無法同時達到比較理想的優化狀態。如何理解這一矛盾的性質以及如何實現車輛側向運動和橫擺運動的綜合改善從而進一步提高車輛的操縱穩定性,將是需要我們深人思考和研究的問題。
由于輪胎本身存在側向力飽和的情況,因此主動轉向極限工況下作用非常有限。車輛的操縱穩定性不僅可以通過轉向來影響,而且可以通過縱向運動(驅動、制動)的控制產生的直接橫擺力矩來影響,同時,它還與車輛的懸架系統特性有著密切的關系。因此,主動前輪轉向系統與各系統間的集成控制就成為未來的必然選擇。通過集成控制,可以將各系統對操縱穩定性影響的優勢充分發揮出來,最大限度地提高車輛在極限工況下的穩定性。目前,已經出現了一些主動前輪轉向與其他系統的集成控制方案,比較多見的是主動前輪轉向與直接橫擺力矩控制的集成,以及主動前輪轉向與主動懸架的集成等。
圖9所示為主動前輪轉向與直接橫擺力矩控制的集成控制系統的控制算法框圖。該控制系統可以提高車輛穩定性,拓寬極限行駛區域,減小轉向幅度,更少產生由于制動干預引起的急劇減速,從而使車輛行駛安全性、舒適性得到大大提高。
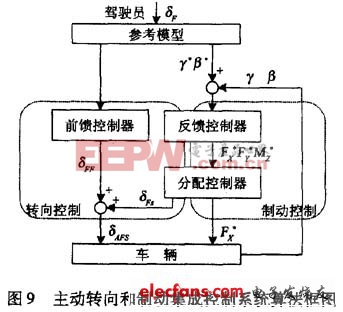
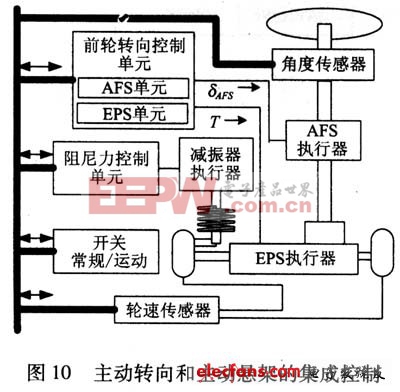
圖10所示為豐田公司提出的一種主動轉向和主動懸架集成控制結構。系統由前輪轉向控制單元和阻尼力控制單元組成。分為正常模式和運動模式,通過一個開關來進行選擇。在運動模式中,轉向傳動比更小,減振器的阻尼力大于正常模式。在兩種模式下,轉向力的感覺是相同的。

伺服電機相關文章:伺服電機工作原理

評論