主動前輪轉向控制技術研究

常見主動轉向系統有主動前輪轉向系統AFS和四輪轉向系統(也稱為主動后輪轉向)。主動前輪轉向是隨著線控轉向技術的發展而發展起來的一項技術,并且隨著寶馬的主動轉向系統裝配實車而進入實用階段。由于主動前輪轉向與傳統車輛的結構能夠很好兼容,同時對車輛操縱穩定性的提高效果明顯,顯示出了良好的發展前景,成為轉向系統未來發展的主要方向之一。
本文引用地址:http://www.104case.com/article/197435.htm1 主動前輪轉向系統的工作原理
目前可用于乘用車的主動轉向系統主要有兩種形式:一種是以寶馬和ZF公司聯合開發的AFS系統為代表的機械式主動轉向系統,通過行星齒輪機械結構增加一個輸入自由度從而實現附加轉向,目前已裝配于寶馬5系的轎車上,以及韓國的MANDO、美國的TRW、日本的JTEKT公司也有類似產品;另一種是線控轉向系統(SWB),利用控制器綜合駕駛員轉向角輸入和當時的車輛狀態來決定轉向電機的輸出電流,最終驅動前輪轉動。該系統在許多概念車和實驗室研究中已廣泛采用,如通用公司的Sequel燃料電池概念車就采用了線控轉向技術。
線控轉向和機械式主動轉向系統最大的區別體現在當系統發生故障時,機械式主動轉向系統仍能通過轉向盤與車輪間的機械連接確保其轉向性能,而線控轉向必須通過系統主要零件的冗余設計來保證車輛的安全性。由于上述安全性和可靠性的原因,目前法律上還不允許將線控轉向系統直接裝備車輛。
1.1 機械式主動轉向系統
下面以寶馬的AFS系統為例,介紹機械式主動轉向系統的結構和工作原理。該系統主要由三大子系統組成:液壓助力齒輪齒條動力轉向系統、變傳動比執行系統和電控系統。系統原理圖如圖1所示。
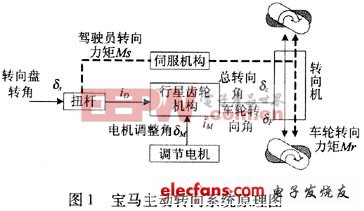
該系統除傳統的轉向機械構件外,主要包括兩大核心部件:一是一套雙行星齒輪機構,通過疊加轉向實現變傳動比功能;二是Sewtronic液力伺服轉向系統,用于實現轉向助力功能。在駕駛過程中,駕駛員輸入的力矩和轉角共同傳遞給扭桿,其中的力矩輸入由液力伺服機構根據車速和轉向角度進行助力控制,而角輸入則通過由伺服電機驅動的雙行星齒輪機構與控制器輸出的附加轉角進行角疊加,經過疊加后的總轉向角才是傳遞給齒輪齒條轉向機構的最終轉角。其中,控制器輸出的轉角是根據各個傳感器的信號,包括車輪轉速、轉向角度、偏轉率、橫向加速度經綜合計算得到的。由于寶馬主動轉向系統不僅能夠對轉向力矩進行調節,而且還可以對轉向角度進行調整,因而可以使轉向輸入與當前的車速達到最佳匹配。1.2 線控轉向系統
一般來說,線控轉向系統由方向盤總成、轉向執行總成和主控制器(ECU)3個主要部分以及自動防故障系統、電源等輔助系統組成,系統結構如圖2所示。
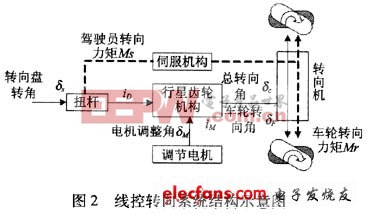
方向盤總成包括方向盤、方向盤轉角傳感器、力矩傳感器、方向盤回正力矩電機。其主要功能是將駕駛員的轉向意圖(通過測量方向盤轉角)轉換成數字信號,并傳遞給主控制器;同時接受主控制器送來的力矩信號,產生方向盤回正力矩,以提供給駕駛員相應的路感信息。
轉向執行總成包括前輪轉角傳感器、轉向執行電機、轉向電機控制器和前輪轉向組件等。轉向執行總成的功能是接受主控制器的命令,通過轉向電機控制器控制轉向車輪轉動,實現駕駛員的轉向意圖。
主控制器對采集的信號進行分析處理,判別汽車的運動狀態,給方向盤回正力電機和轉向電機發送指令,控制兩個電機的工作,保證各種工況下都具有理想的車輛響應,以減少駕駛員對汽車轉向特性隨車速變化的補償任務,減輕駕駛員負擔。同時控制器還可以對駕駛員的操作進行判別。
由于線控轉向系統結構的特殊性,因而自動防故障系統成為線控轉向系統的重要模塊,它包括一系列的監控和實施算法,針對不同的故障形式和故障等級做出相應的處理,以求最大限度地保持汽車的正常行駛。
2 主動前輪轉向動力學控制
2.1 橫擺角速度的控制
在一般的駕駛操作中,駕駛員要同時完成兩個任務:(1)路徑跟隨;(2)車輛姿態的保持。路徑跟隨由于涉及到路線的選擇和跟隨等復雜問題,目前還無法由控制器完全取代駕駛員。相反,因為外界擾動對車輛姿態的影響常常很突然,車輛姿態的控制對駕駛員而言,特別是對新手來說,就比較困難。而這樣的控制由控制器卻完全可以實現。由于涉及到車輛的姿態控制的動力學參數主要是橫擺角速度,因而對橫擺角速度的控制也成為主動前輪轉向控制最重要的方面。
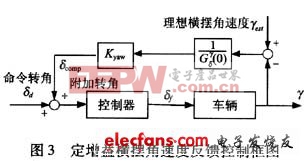
對橫擺角速度的控制,常見的方法有3種:(1)橫擺角速度反饋控制;(2)魯棒單向解耦橫擺角速度控制;(3)基于擾動觀察器的橫擺角速度控制。橫擺角速度反饋控制的基本思路是利用理想橫擺角速度Yest和實際橫擺角速度Y之差進行反饋控制。寶馬的主動轉向系統運用的是橫擺角速度反饋控制的方法,其控制器為PI控制。橫擺角速度反饋控制不但使橫擺角速度響應的帶寬增大,而且使橫擺角速度阻尼增大,尤其是在車速較高時改善了車輛的操縱穩定性。但也同時存在著降低橫擺角速度和側向加速度的增益,進而使駕駛員中低速時操縱困難。針對上述問題,一般采用定增益形式的橫擺角速度反饋控制進行改進,該控制方法可保持車輛橫擺角速度增益在反饋控制時不變。圖3所示為一定 增益橫擺角速度反饋控制框圖。其中,為車輛在等速圓周運動情況下從前輪轉角到橫擺角速度的增益,Kyaw為反饋比例系數。
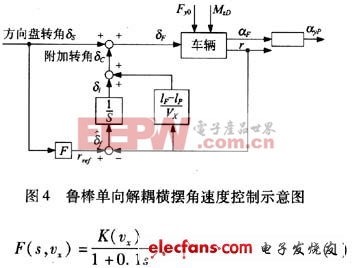
魯棒單向解耦橫擺角速度控制是由德國宇航局的阿克曼教授提出的,在合理分解駕駛員操作任務的基礎上,對橫擺角速度和側向加速度單向解耦,進而對橫擺角速度進行控制。所謂單向解耦,指的是控制器在對車輛的橫擺角速度進行反饋控制時對車輛前橋解耦點的側向加速度沒有影響,而在駕駛員進行側向運動控制時,可以通過側向加速度間接影響橫擺角速度,保證車輛能順利過彎,這是該算法的最大特點。由于該算法本身對車輛不確定參數(如:車輛質量分布、車速、輪胎與地面間的附著系數)具有一定的魯棒性,故而稱為魯棒單向解耦控制。魯棒單向解耦控制也存在橫擺角速度阻尼隨車速的增加而下降的問題,可采用預設橫擺角速度阻尼的控制方法加以解決。該方法是在單向解耦控制和橫擺角速度阻尼之間進行折衷,實現既能在不同車速下保持較好的橫擺角速度阻尼特性,又能維持車輛控制對名義模型的橫擺角速度單向解耦。圖4所示為魯棒單向解耦橫擺角速度控制框圖。圖中在實際控制時采用的是一個衰退的積分,從而使橫擺角速度的控制只在擾動發生1 s內產生作用,幫助駕駛員穩定車輛,1 s以后,車輛將完全在駕駛員的控制之下。參考橫擺角速度值由式(1)算出,是一個與速度有關的穩態值。

伺服電機相關文章:伺服電機工作原理

評論