主動前輪轉向控制技術研究

近年來,隨著控制技術的發展,一種以往多用于電機控制的擾動觀察器控制方法被移植到了車輛橫擺角速度控制中。該控制方法的基本原理如圖5所示,利用擾動觀察器理論建立的反饋補償器,通過反饋補償器根據車輛包含擾動的實際橫擺角速度生成一個補償轉角,疊加到車輛的輸入轉角上,從而實現對車輛橫擺角速度的控制。反饋補償器的表達式如下:
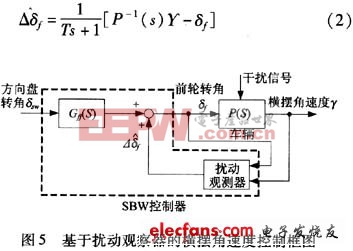
從表達式中可以看出,所謂的擾動觀察器其實質是利用車輛的反向動力學傳遞模型,通過車輛的實際橫擺角速度來計算車輛的名義前輪轉角,進而通過與實際前輪轉角求差來得到抵消橫擺擾動的轉角來進行控制。由于控制過程中橫擺角速度信號會遇到噪聲信號,故一般擾動觀察器都帶有一個低通濾波環節。低通濾波環節同時還有改變反向動力學模型分子分母階次的作用,使其在控制上可以實現。基于擾動觀察器的橫擺角速度控制具有結構簡單,含義清晰,對外界擾動和系統參數變化具有較強的魯棒性特點。理論和實驗證明擾動觀察器的控制結構更適合進行橫擺穩定性控制,成為未來橫擺角速度控制發展的一個方向。2.2 D*控制
D*控制(或稱為橫擺角速度和側向加速度的綜合控制)源于四輪轉向控制中對后輪轉向的控制策略,是一種對車輛的橫擺角速度和側向加速度進行綜合控制的方法。在該控制中,控制的反饋量不再只有橫擺角速度,而是橫擺角速度與側向加速度的線性組合,如式(3)所示。
式中:Cy為側向加速度,VY為車速與橫擺角速度的乘積,兩者量綱一致,從這里可以看出,D*控制是一種側重于側向運動控制的控制方法。
D*控制框圖如圖6所示,其中D*由理想車輛模型推出的與車速有關的比例系數與駕駛員輸入的轉角求得。CFF(s)為前饋控制傳遞函數,主要實現的是隨車速改善車輛響應增益,CFS(s)為反饋控制環節,用來生成附加轉角。
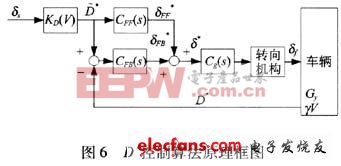
與橫擺角速度反饋控制相比,D*控制可以進一步提高車輛的轉向響應速度,在抑制擾動的同時,提高車輛軌跡跟蹤的能力,在側向運動要求比較高的工況下(如:低附著系數路面雙移線,側向陣風直線行駛)效果較好。
2.3 側傾穩定性控制
在車輛行駛過程中,高速過彎、緊急避讓和側向陣風的干擾都有可能直接導致車輛側翻,另外,重心偏高的車輛也特別容易發生側翻。還有,當駕駛員對車輛的側向穩定性做出錯誤估計時,也會導致車輛側翻的發生。側向加速度是影響車輛側向穩定性的主要因素,通過主動轉向可有效地影響車輛的側向加速度從而控制車輛的側傾。一般來說,車輛的防側翻控制采用一個指示車輛側傾狀態的闕值,當檢測到的側傾狀態超過闕值,則觸發防側翻控制。闕值可以是重心處的側向加速度、車輛側翻系數或者載荷轉移系數等。
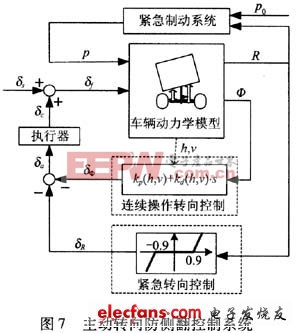
圖7所示為基于主動轉向和制動集成控制的控制系統圖。圖中只為側翻系數,是由車輛的輪寬和簧載質量重心處的側向加速度來求得。當,|R|1時,意味著車輛側向穩定,而當R=±1時,則意味著車輛左側或右側的車輪將抬離地面。該控制有兩種模式,當|R|0.9時,車輛正常行駛,控制系統處于連續操縱轉向控制模式,附加轉角根據對側傾阻尼的優化策略產生,可以有效減小轉向產生的側傾,抑制處于車輛側傾共振頻帶內的外界擾動。當,|R|≥0.9時,車輛處于側傾危險狀態,控制系統進入緊急轉向控制模式,此時附加轉角δR=kR(|R|-0.9),可以有效增大車輛轉彎半徑,同時系統進行一定的緊急制動操作,進一步降低車速,從而避免車輛發生側翻。

伺服電機相關文章:伺服電機工作原理

評論