DSP幫助實現智能車載安全系統

3 功能實現
3.1 激光測距的功能實現
原理圖如圖2,假設激光束與攝像頭的光軸完全平行,激光束的中心落點在攝像頭視域中為最亮點。當激光束照射到攝像頭視域中的跟蹤目標上時,攝像頭就可以捕捉到這個點。

易推導得距離D:

其中:Num是從圖像中心到落點的像素個數,Rop 是每個像素的弧度值,Offet 是弧度誤差。
算法流程為:首先,啟動攝像頭,通過攝像頭采集視頻圖像,截取圖像;通過亮點檢測程序尋找激光所示的亮點,如果存在,測量其距圖像中心的像素個數Num ;最后,通過公式計算間距,通過與設定的安全距離的比較,確定是否安全,不安全則發出警報提醒。
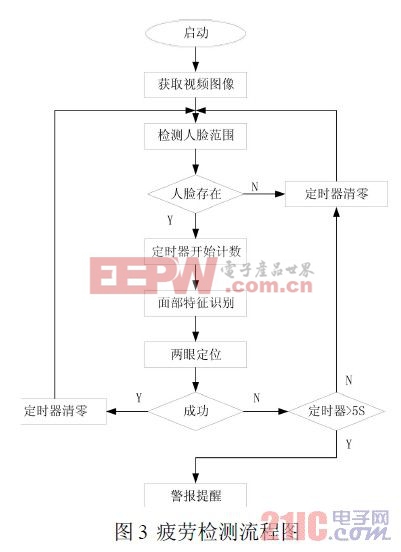
3.2 疲勞駕駛檢測功能實現
研究表明,人在發生困倦的時候,眨眼速度變慢,眨眼持續時間變長,本系統通過提取司機的閉眼持續時間的長短來判斷是否有疲勞發生。
通過檢測人臉范圍,判斷人臉是否存在,如果不存在,定時器清零,返回;如果檢測到人臉,定時器啟動,開始計數;同時,通過面部特征識別,來定位兩眼;認為如果能在一定的時隙內定位到兩眼,證明駕駛員并非出于疲勞駕駛狀態;此時定時器清零,返回;如果在5S 內無法定位到眼睛,則認為處于疲勞駕駛,此時發出警報提醒。
算法流圖見圖3。











評論