一種基于車載MP3播放機(jī)的倒車?yán)走_(dá)設(shè)計(jì)

1.2 主要器件選擇
考慮到該款車載MP3播放機(jī)的功能要求,以及生產(chǎn)成本、芯片內(nèi)部資源、等因素,本系統(tǒng)使用EM78P153實(shí)現(xiàn)倒車?yán)走_(dá)設(shè)計(jì)中數(shù)據(jù)采集模塊。該芯片具有32×8 b片內(nèi)SRAM、1 024×13 b片內(nèi)ROM、12個(gè)可編程的雙向復(fù)用I/O、1個(gè)8位實(shí)時(shí)計(jì)時(shí)/計(jì)數(shù)器TCC、1個(gè)可編程自由運(yùn)行看門狗定時(shí)器WDT。EM78P153芯片既滿設(shè)計(jì)要求,又具備價(jià)格優(yōu)勢(shì),且技術(shù)成熟度較高,故成為方案設(shè)計(jì)首選。
語(yǔ)音芯片選擇性價(jià)比較高的AK020,它是一款一次性燒錄語(yǔ)音IC芯片。其主要特點(diǎn)是腳位少、體積小,有DAC和PWM驅(qū)動(dòng)方式語(yǔ)音輸出,外圍元器件少。芯片可容納最多64組聲音。用戶可選擇的8位5位和4位數(shù)據(jù)壓縮。支持3模式觸發(fā)功能:獨(dú)立模式、串行觸發(fā)模式、CPU命令模式。
2 方案原理
倒車?yán)走_(dá),又稱泊車輔助系統(tǒng)。它是汽車泊車或者倒車時(shí)的安全輔助裝置,由超聲波傳感器、控制器、顯示器和語(yǔ)音芯片等部分組成。它能以語(yǔ)音和更為直觀的LCD顯示告知駕駛員周圍障礙物的情況,避免了駕駛員倒車時(shí)障礙物損傷汽車,甚至引發(fā)交通事故,并幫助駕駛員掃除了視野死角,增強(qiáng)汽車的后視能力,提高駕駛的安全性。
超聲波測(cè)距原理是借助超聲波指向性強(qiáng),能量緩慢消耗的特點(diǎn),通過(guò)超聲波發(fā)射器向某一方向發(fā)射超聲波。在發(fā)射時(shí)刻的開始進(jìn)行計(jì)時(shí)。超聲波在空氣中傳播時(shí)遇到障礙物立即被反射回來(lái),超聲波接收器在收到反射波就立即停止計(jì)時(shí)。超聲波在空氣中的傳播速度為v,而根據(jù)計(jì)時(shí)器記錄的發(fā)射超聲波和接收到回波的之間的時(shí)間t,就可以計(jì)算出發(fā)射點(diǎn)和障礙物之間的距離l,即:
l=vt/2 (1)
這就是超聲波時(shí)間差測(cè)距法。
倒車?yán)走_(dá)數(shù)據(jù)采集系統(tǒng)如圖3所示,該系統(tǒng)由數(shù)據(jù)采集芯片EM78P153發(fā)送40 kHz的信號(hào)以及4路通道選擇信號(hào)控制超聲波信號(hào)的發(fā)射。當(dāng)駕駛員將手柄轉(zhuǎn)到倒車檔后,車載MP3播放機(jī)自動(dòng)轉(zhuǎn)換進(jìn)入倒車模式,并且啟動(dòng)計(jì)時(shí)/計(jì)數(shù)器TCC,接收到回波信號(hào)后關(guān)閉TCC。通過(guò)計(jì)時(shí)/計(jì)數(shù)器TCC準(zhǔn)確測(cè)出超聲波從發(fā)射到遇到障礙物反射返回的時(shí)間,根據(jù)超聲波的速度計(jì)算出汽車與障礙物之間的探測(cè)距離,并將探測(cè)距離發(fā)送到主控芯片。通過(guò)主控芯片將探測(cè)距離實(shí)時(shí)地顯示在LCD上,并發(fā)出相應(yīng)的報(bào)警提示。本文引用地址:http://www.104case.com/article/197009.htm

3 系統(tǒng)部分設(shè)計(jì)
3.1 EM78P153數(shù)據(jù)發(fā)送
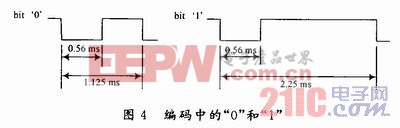
芯片EM78P153采集到探測(cè)距離的數(shù)據(jù)后,通過(guò)單線接口方式將4路數(shù)據(jù)發(fā)送到主控芯片上。考慮到傳輸距離很短,在數(shù)據(jù)編碼中沒(méi)有采用校驗(yàn),具體編碼有以下特征:
采用脈寬不同的串行碼,以脈寬為0.565 ms、間隔0.56 ms、周期為1.125 ms的組合表示二進(jìn)制的“0”;以脈寬為0.565 ms、間隔1.685 ms、周期為2.25 ms的組合表示二進(jìn)制的“1”,其波形如圖4所示。
上述0和1組成連續(xù)的32位二進(jìn)制碼組,前16位是分別是超聲波發(fā)射/接收器1和超聲波發(fā)射/接收器2采集到的探測(cè)距離,后16位是分別是超聲波發(fā)射/接收器3和超聲波發(fā)射/接收器4采集到的探測(cè)距離,如圖5所示。其中引導(dǎo)碼由9 ms的低電平和4.5 ms的高電平組成。其中8位數(shù)據(jù)碼,第7位和第6位組合表示4路傳感器,“00”表示傳感器1,“01”表示傳感器2,“10”表示傳感器3,“11”表示傳感器4;第5位始終等于0;剩下的5位數(shù)據(jù)表示探測(cè)距離。













評(píng)論