未來汽車中的終端節點通訊

本文旨在介紹本地互聯網這種低成本的串行通訊協議,它主要用于汽車的分布式電子系統和基于網絡的車輛概念中。
本文引用地址:http://www.104case.com/article/197007.htm本文介紹了現行的LIN版本,即從原來的LIN1.3版升級而來的LIN 2.0,并介紹了LIN網絡的一些基本知識。作為實施LIN2.0的實例,本文還介紹了支持LIN的無刷直流電機(BLDC)發動機風扇控制的應用,它以飛思卡爾的8位MCU為基礎,使用了Volcano LIN 開發包。
車內網絡解決方案
新技術為車輛帶來的眾多改變之一就是電子零部件的不斷增加,同時,帶有多種傳感器、執行器、電子控制器的高級控制系統也對車用通訊技術提出了巨大需求。顯而易見,這些需求只能通過使用這種網絡解決方案來滿足,因為車內環境各不相同,所以,本文將介紹三種能滿足成本、安全性和通訊速度需求的主要通訊標準。
FlexRay
CAN -控制器局域網絡
LIN -本地互聯網絡
以上三種通訊標準在通訊速度和每個節點的成本方面的比較,見圖1
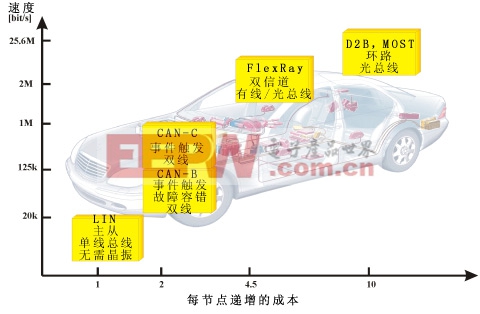
圖1: 主要汽車通訊協議
每個通訊標準都有各自的優點和目標應用平臺:
FlexRay--高速度(每信道高達10 Mbps)、雙信道、時間觸發、強大的容錯協議,設計用作骨干網。一般的目標應用是所謂的X-by-wire(線控)概念。其目的是通過電子信號傳輸來替代傳統的制動踏板和制動器或方向盤和車輪之間的機械傳動。 CAN(控制器局域網)--中等速度(最高1Mbps)、單信道、雙線容錯協議,目前不僅在汽車業,還在許多工業應用中廣泛使用。CAN協議的目標應用可以包括電機控制、懸架控制和車內信息娛樂功能。 LIN-本地互聯網絡--低速(最高20kbps)、單線低成本協議,可用于終端節點應用。LIN的概念注定這種協議用于傳感器/執行器中,一般用于低速通訊,即速度不是關鍵因素的應用中。
圖2是面向總線的汽車設計理念的一個例子。這種設計顯示三種通訊協議的共存。
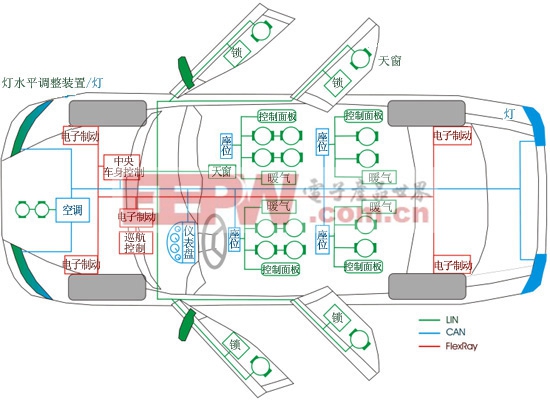
圖2:總線車概念
LIN--本地互聯網絡
如上所述,LIN是一種低成本的單線串行通訊接口。它基于通用的UART/SCI接口,可以20 kbps的波特率保證數據的可靠傳輸。LIN總線一般應用于集成裝置,比如門、方向盤、座椅、溫度控制和發動機冷卻風扇等。在這些裝置中,LIN網絡對成本敏感的特性使其采用了一系列先進的機械電子裝置,如智能傳感器/執行器。此外,通過用數字編碼代替模擬編碼,機械電子裝置可以輕松連接到車輛網絡系統,并易于進行各種診斷和維修,包括系統的重新編程和更新。
LIN協議的另一個主要特征是從節點中可以自動完成同步而無需晶振或陶瓷振蕩器。這一特性和基于SCI的通訊的簡便性是任何LIN實施提供經濟高效性的主要因素。
操作基礎
LIN的操作概念基于一主多從的拓撲結構。在這種情況下,LIN集群(LIN 2.0版中LIN網絡的同義詞)包含一個主節點和幾個(多達15個)從節點。

圖3: 操作概念
如圖3所示,LIN節點實際上可以分成兩個獨立的部分:
主任務(Master task),負責決定何時傳輸哪個幀 從任務(Slave task),提供將通過LIN總線傳輸的數據,并允許通過節點從低功耗模式中喚醒LIN集群。
典型的主節點包含主任務和從任務,而從節點只包含從任務。
幀的組成
通過LIN總線傳輸的數據單位叫作幀。每個幀包含兩個主要部分:
主任務提供的報頭。 從任務處理的響應。

圖4:LIN幀的組成
報頭包含以下幾個部分:
中斷(Break) - 至少13位長的LIN總線的主導狀態,由主任務產生,包含每個LIN幀。 同步字段(Synchronisation field) - 數據值在0x55的位字段,使從任務能與主時鐘同步。 受保護的識別符(PID) - 獨特地定義消息內容但不定義接收方的地址。PID以一個6位長的識別符開始,后面跟有兩個奇偶校驗位。
LIN幀的響應部分是節點的從任務提供的,可分為以下兩部分:
數據字段--傳輸1到8個字節的數據。 檢驗和字段--包含反向轉化的8個字節總和,包括后續(Carry Over)數據字節。
LIN幀的結構見圖5。
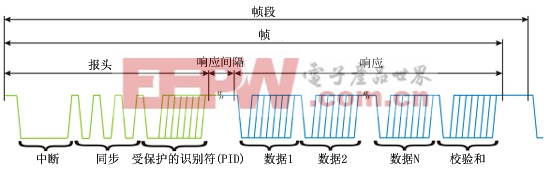
圖5:LIN幀結構
在LIN幀的響應部分傳輸的數據內容有三種類型:
信號 - 響應的數據字段中包含的梯狀值或字節陣列。在這種情況下,幀的ID必須在0x00和 0x3B之間。注意,數據段中信號的位置對帶有相同 PID的幀來說是固定的。 診斷信息 - 用來傳輸診斷或配置數據。這些信息總是8位長,并帶有預留的ID號。0x3C ID用于主請求, 而0x3D 用于從響應。 保留信息 - 可用于用戶定義的擴展名 (這種情況下ID等于0x3E)或預留用于未來的協議改進(ID設為0x3F)。
主任務對報頭的傳輸基于集群的時間表。時間表規定了傳送幀的順序,以及當前和下一個幀之間的間隔。由于時間表的數量從理論上講沒有限制,所以可以定義幾個不同的時間表來滿足集群運行的不同需求。時間表概念是一個機制,有助于確保網絡不會過載,并確保有保證的數據傳輸。










評論