汽車輔助照明隨動系統設計

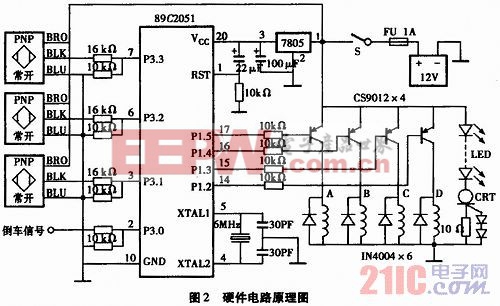
1.8 復位電路
復位電路由單片機1腳周邊的阻容電路組成,為單片機控制電路上電時在RST端產生一正脈沖,啟動單片機工作。
硬件電路原理圖如圖2所示:本文引用地址:http://www.104case.com/article/196966.htm
2 軟件流程圖
軟件流程圖如圖3所示。根據系統功能要求,當開關S閉合時,系統啟動,單片機對左、中、右三個霍爾開關進行檢測,輔助照明光源開啟,燈光亮。當方向左轉時,單片機控制步進電機左轉。當方向右轉時,單片機控制步進電機右轉。當方向轉正時,單片機控制步進電機轉到中間位置。
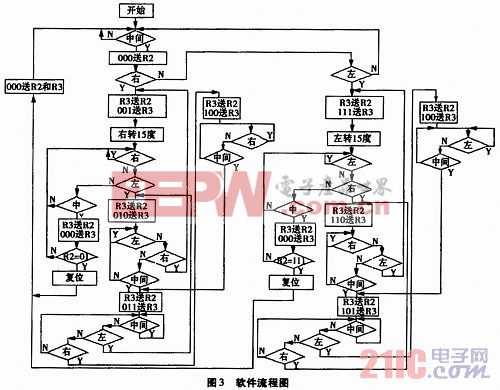
但實際上方向左轉時可能有三種情況:一是左轉半圈,測到一個左轉信號;二是左轉一圈,測到一個左轉信號、一個右轉信號和一個中間信號;三是左轉一圈半,測到一個左轉信號、一個右轉信號、一個中間信號和一個左轉信號。這三種情況的任何一種都是使步進電機左轉30度。同理右轉時也存在三種情況:一是右轉半圈,測到一個右轉信號;二是右轉一圈,測到一個右轉信號、一個左轉信號和一個中間信號;三是轉一圈半,測到一個右轉信號、一個左轉信號、一個中間信號和一個右轉信號。這三種情況的任何一種都是使步進電機右轉30度。所以我們控制步進電機的左、右轉并不能直接根據檢測到的左、右狀態信號來控制步進電機的左、右轉,而要根據以上6種情況進行分析判斷,完成對步進電機的左、右轉動控制來解決夜間行車時左、右轉動方向燈光照明問題。
3 結束語
以上是對汽車輔助照明隨動系統硬件部分、接口分配以及軟件流程的設計。以后還需從空氣動力學的角度對LED燈具的外形進行設計,從防水密封的角度對輔助照明系統的轉動部分進行設計,對控制程序進行調整和優化,力爭做到簡單、適用、可靠、經濟。










評論