雷達技術在汽車系統設計的作用

今后幾年中,雷達會在高級輔助駕駛系統(ADAS)的發展中扮演重要角色。隨著其角色的擴展,雷達收發器、信號處理和自動避險等功能將使得車載ADAS系統越來越像作戰飛機中的戰術系統,將對汽車系統設計基礎產生很大的影響。
本文引用地址:http://www.104case.com/article/196308.htm為什么是雷達?
對ADAS的大部分討論都集中在使用可見波長攝像機的被動視覺系統上。而Freescale半導體公司的雷達系統工程師Ralf Reuter很有說服力的論證了77-GHz雷達的作用。
Reuter在一次最近的訪談中談論到:“重要的一點是,[ADAS傳感技術]只有雷達是與天氣無關的。而攝像機在識別目標上有優勢,雷達更善于探測物體,測量其速度。”
Reuter解釋到,出于這些原因,很多重視探測和風險分類評估的早期系統會選擇雷達。他指出:“在歐洲,對卡車緊急剎車系統有很大的需求。它是基于雷達的。”
雷達系統會啟動一個簡單的中距離系統,向前直視整條道路。但是,很快會發展到多傳感器系統,同時包括長距離前視和短距離360度危險評估功能,如圖1所示。
雖然光學視覺系統非常成熟了,而雷達系統的優勢會使其更加完善。Reuter預測,在不久的將來,具有目標識別的多攝像機復雜系統能夠融合視頻和雷達數據,對周圍的世界建立動態模型。
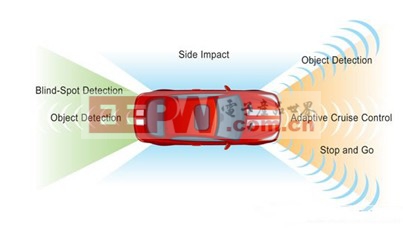
圖1.雷達系統能夠進行前向搜索,以及觀察車輛四周。
采集信號
理解雷達對汽車系統設計的影響是從理解傳感器開始的。大部分汽車雷達設計都愿意使用24或者77-GHz自由頻段。發送器一般是頻率調制的連續波(FMCW)設計,它發出“啁啾”:在頻域的快速變化,如圖2所示。
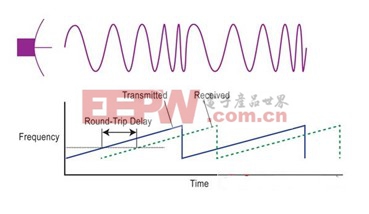
圖2.車載雷達將使用啁啾類型的FMCW。
Reuter解釋說:“FMCW最大的優勢是簡化了對反射信號的理解。您可以從反射頻率中直接讀取目標范圍,從多普勒頻移中得出速度。與脈沖調制方案相比,產生CW不太復雜,理解起來也很容易,很可靠。這是車輛廠商最關心的問題,他們覺得花在改進ADAS上的每一個歐元都直接來自企業利潤。
接收信號也需要低成本新穎的設計。通過采集方位信息來收集反射信號需要機械掃描天線或者相控陣天線,并且結合了數字聚束算法。天線后面一般是具有很多通道的零差接收機,這是天線設計所需要的——用于簡單旋轉天線,一個陣列有16個。
Reuter說:“接收機輸出是DC-20-MHz頻帶的基帶信號。”設計實現具有良好方位角分辨率的系統會有8至16個通道,需要8至16個高速模數轉換器(ADC)。
從啁啾中提取信息
來自每一通道的數字基帶信號流入到快速傅里葉變換(FFT)模塊中,實現長度高達2K采樣的變換。Reuter說:“過去,執行FFT意味著需要很多FPGA。今天,發展趨勢是集成了浮點DSP加速器的32位微控制器。”聚束系統可以使用兩塊FFT從信號中提取出范圍和速度數據,如圖3所示。
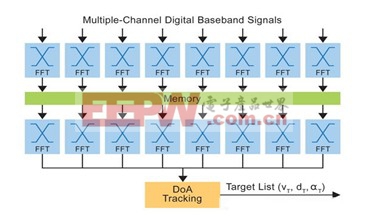
圖3.聚束以及范圍和速度估算的FFT配置。
實際上,這一前端處理單元處理輸入的多個FMCW模擬通道,形成方位角/范圍/速度數組的數字碼流。這一數據流進入到一個或者多個CPU內核中,由其他加速器所支持的軟件會推斷出在車輛周圍是否有物體出現,物體的位置以及屬性。
Reuter解釋說:“您需要識別出目標,把它們從背景中分離出來,選擇最關鍵的一個。您可能需要處理200個目標,因此,計算會非常復雜,特別是提取出角度信息。”
系統的物理配置也越來越復雜。Reuter說,目前傳感器本身的處理工作很少。相反,ADC有專用模擬接口,信號處理硬件的專用數字接口用于FFT,微控制器還有其他的接口來提取出目標,并對其進行分類。目標信息被輸入到車輛控制區域網(CAN)或者FlexRay總線上,中央CPU集群對其進行解釋和分析。
整條流水線都有很大的帶寬和延時要求。Reuter說,CPU對數據的解釋一般以圖形顯示的方式呈現給司機,即,他通過擋風玻璃能夠觀察到的前端多功能顯示屏。這種混合顯示要求最多不能超過50-ms的更新間隔,以及更具挑戰性的50-ms最大延時。否則,圖像會很不平穩,通過擋風玻璃的圖像會有滯后,可能導致司機誤判。
隨著系統從一個傳感器發展到支持聚束功能的多個傳感器,以實現攝像機數據融合,互聯體系結構也發生了變化。Reuter說:“有使用以太網來降低成本的需求。”但是,系統仍然要求實時工作,帶來了怎樣保證以太網實時性的問題。
到處都是干擾的未來
只要周圍沒有人使用雷達,車載雷達一般都比較可靠。但是,這有很明顯的問題:越來越多的車輛使用了雷達,因此,設備之間不可避免的會出現干擾。Reuter說,您可以改變調制速率以減小干擾,最終,采用編碼跳頻碼型來替代簡單的頻率變化,因此,每一輛車都能夠識別出自己的啁啾。
這種變化能夠保持早期系統的體系結構以及大部分硬件不變,但是要實現復雜的提取和分析功能,則要求每一系統能夠識別出來自其天線的反射信號。
而且,還有一類不容易解決的問題:固定設備所產生的干擾。Reuter提醒說:“馬上帶來的問題是,歐洲的隧道使用大功率雷達來識別車輛。他們的發射器會導致車載雷達無法工作。”
一個更科學化的敏感問題是,天文物體輻射頻譜的關鍵部分位于77-GHz頻帶。在人口密集區,越來越多的車載雷達會強烈干擾天文射頻信號。Reuter提醒說:“在日本已經出現了要求關掉射頻天文望遠鏡1,000公里范圍內發射器的法規。這有可能覆蓋整個國家。”
啁啾調制器、數字聚束、目標識別、危險評估、防護跳頻、干擾等——這些聽起來都像是新型作戰飛機的情形,而不是貨車和轎車。實際上,ADAS繼承了軍事系統的很多技術。這并不奇怪,當天氣越來越糟,車越來越堵時,這的確像是一場戰爭。











評論