LFMCW雷達運用于汽車防撞的研究

3.2 LFMCW雷達回波信號的雜波處理
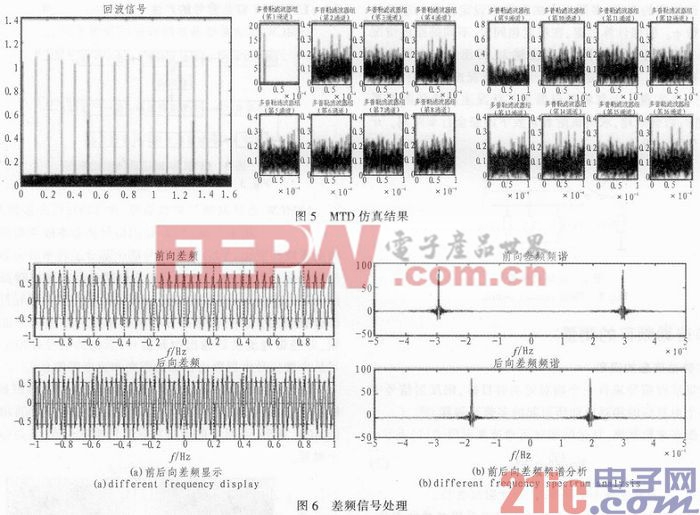
將發射信號與回波信號耦合至混頻器進行混頻,輸出中頻信號,結合實際考慮到各種背景(如地物、云雨等)的干擾回波信號,雷達目標回波信號往往是混疊在干擾雜波背景中。大多數雜波都屬于分布雜波,且存在內部運動,頻譜較寬。此時就需要對回波信號進行動目標檢測(MTD)。雷達信號的動目標檢測是利用與相參回波脈沖串匹配的多普勒濾波器組來抑制各種雜波,改善功率信雜比,實現相參積累,以增強雷達在雜波背景中檢測運動目標能力的技術。其實質是相當于對不同通道進行相參積累處理。其實現方法就是將回波信號通過一組多普勒濾波器組,進行信號處理,將動目標回波與雜波分別開來。MTD處理的仿真結果如圖5所示。本文引用地址:http://www.104case.com/article/196152.htm
3.3 中頻信號處理
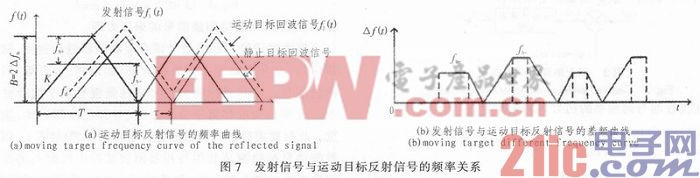
對如圖4所產生的LFMCW信號,對比可只回波信號相對于發射信號有一定的時延,即使存在多普勒頻移,對于中頻信號的前向和后向頻差也必然存在相對于變化周期來說比較長的恒定差值階段,采用矩形窗截取恒定階段并對其進行頻譜分析,如圖6(a)(b)所示,通過處理便可得到前向頻差和后向頻差,進而求得距離和相對速度。
4 LFMCW雷達信號的測距原理
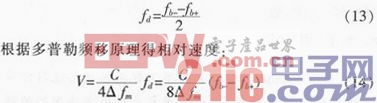
調頻連續波雷達的載頻在調制周期內線性變化。線性變化亦有多種方式,結合測試需求分析,本文采用三角波調制方式的LFMCW進行測量。由相對運動的角度出發,重點研究反射信號來自一個相對運動的目標,則反射信號頻率中還會包括一個由目標的相對運動所引起的多普勒頻移,如圖7所示。
發射信號可表示為:
fl(t+)=fl+Kt (7)
fl(t-)=fu-Kt (8)
式中,K為三角波斜率。
相應的回波信號可表示為:
fr(t+)=fl+K(t-τ)+fd (9)
fr(t-)=fu-K(t-τ)+fd (10)
從而可以得到差頻信號為:
fb+=|fr(t+)-fl(t+)|=Kτ-fd (11)
fb-=|fr(t-)-fl(t-)|=Kτ+fd (12)
兩式相減得到多普勒頻移fd:
結合相對速度的求解公式和防撞系統的設計思想及工作原理可知,要判斷兩車是靠近還是遠離,只需判斷fb-與fb+的符號大小即可。通過以上分析可知:求得LFMCW上下掃頻段的頻率差并比較其數值的大小成為實現有效防撞處理的關鍵。
5 結論
該設計系統著重從測量兩車間的相對運動出發,只要在判斷兩車間距是否滿足安全距離的條件的同時,利用多普勒效應測得兩車間的相對運動是靠近還是遠離,就可以有效的實現汽車防撞,沒必要實時的測得相對速度數值的大小。這樣減少了很多不必要的信號處理與計算。

低通濾波器相關文章:低通濾波器原理



評論