攝像頭識別的智能車硬件系統設計

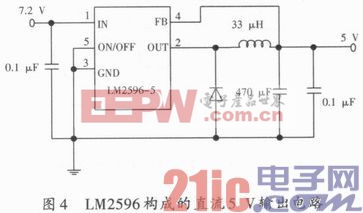
電機驅動電路采用能夠輸出大電流的LM2596開關電壓調節器,能夠輸出3 A的驅動電流。該器件內部集成頻率補償和固定頻率發生器,開關頻率為150 kHz,與低頻開關調節器相比較,可以使用更小規格的濾波元件。由于該器件只需4個外接元件,可以使用通用的標準電感,這更優化了LN2596的使用,極大地簡化了開關電源電路的設計,。具體電路如圖4所示。本文引用地址:http://www.104case.com/article/196128.htm
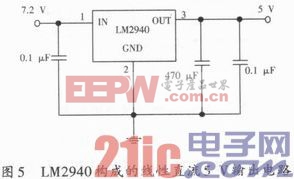
由于數字攝像頭對電壓要求比較高,一般采用線性穩壓電源,不用開關電壓調節,其輸出有尖峰。這里采用LM2940穩壓塊,數字攝像頭、測速模塊、串口通信、單片機分別采用單獨的電源輸出,避免之間發生干擾。具體電路如圖5所示。
2.2 實時控制部分硬件設計
智能車實時控制部分主要包括車速和車的轉型控制即舵機控制,車速部分主要是取決于電機驅動電路的中的PWM,下面分別對電機驅動電路進行設計和對舵機控制做介紹。
2.2.1 電機驅動
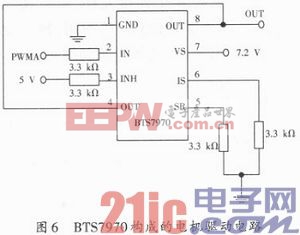
智能車的動力部分使用小型永磁式直流電機,可用分離元件組成的驅動器來驅動,也可用一體化的集成驅動芯片來驅動。為了簡化電路板,減輕小車的重量,本智能車采用一體化的專用集成驅動芯片BTS7970。用單片機的引腳PWM0和PWM1輸出PWM脈沖信號,通過兩路驅動,可以實現加速,減速,停車的實現。由于兩路驅動電路設計一個類型,這里給出其中一路外圍電路,如圖6所示。
2.2.2 舵機控制
舵機又名伺服電機,本智能車采用舵機S3010,通過輸出周期為20 ms的PWM信號來控舵機轉動角度。舵機有三條線一個地線,一個電源線接6 V,控制信號線通過單片機PWM5引入,通過單片機輸出的PWM信號的占空比來控制舵機轉向角度。
2.3 信息獲取與輸入/輸出部分
信息獲取部分包括攝像頭采集的數字圖像、編碼器的測速獲得的車速信息。輸入通過撥碼開關設計幾個檔位,實現不同的車速,以及完成智能車的調試。具體電路如圖7所示。
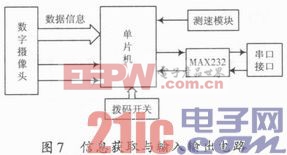
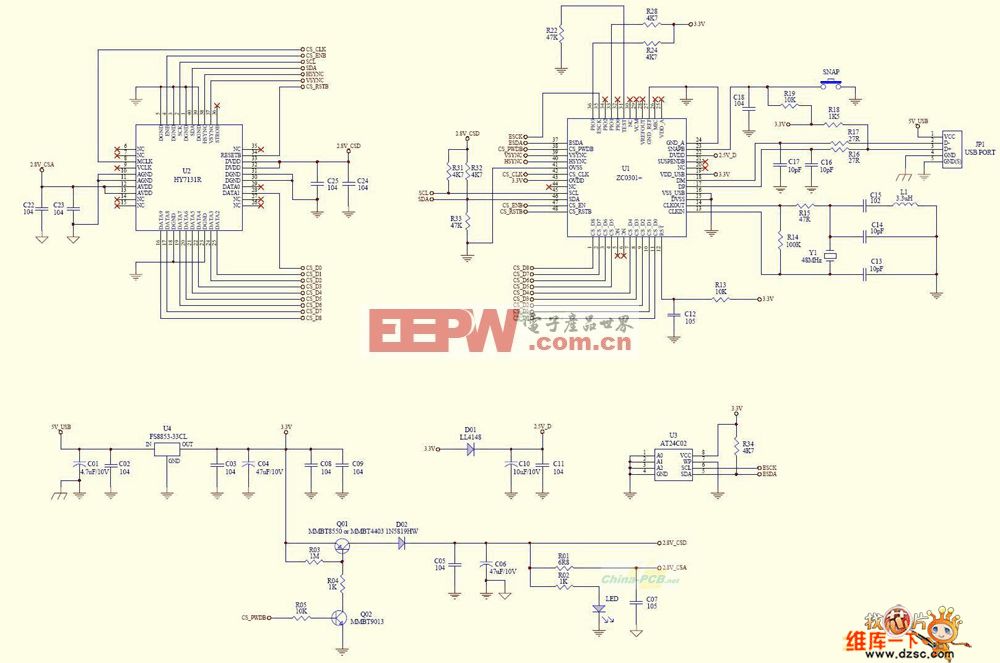
圖7中的數字攝像有采用集成模塊OV7620與單片機直接連接,8位數據線直接與單片機8位數據口連接,行場中斷分別與單片機PT口相連接,完成圖像的采集。單片機的有兩個串口,用其中一個通過MAX232電平轉換和電腦實現通信。測速模塊與單片的PT口當中一個端口連接,實現速度的采集。8位撥碼開關與單片機的8位端口連接,將端口設置為輸入口。
3 結語
智能車系統根據個人實現功能不同,硬件電路有所不同,與相關的軟件程序有關。本文主要介紹了基于攝像頭的智能車的硬件設計電路,詳細的設計智能車的電源部分,電機驅動部分,由于篇幅有限,只給出信息獲取和輸入/輸出與單片機連接框圖,說明與單片機的連接情況。












評論