A3000過程控制實驗系統開發

下面按照類遞推原理,建立單容、雙容、三容系統的數學模型:本文引用地址:http://www.104case.com/article/195689.htm

隨著容器個數的增加,可以根據遞推原理,推導出更加復雜的多容系統數學模型,但在這里不再做更多的推導。
2.2 系統模型的測定
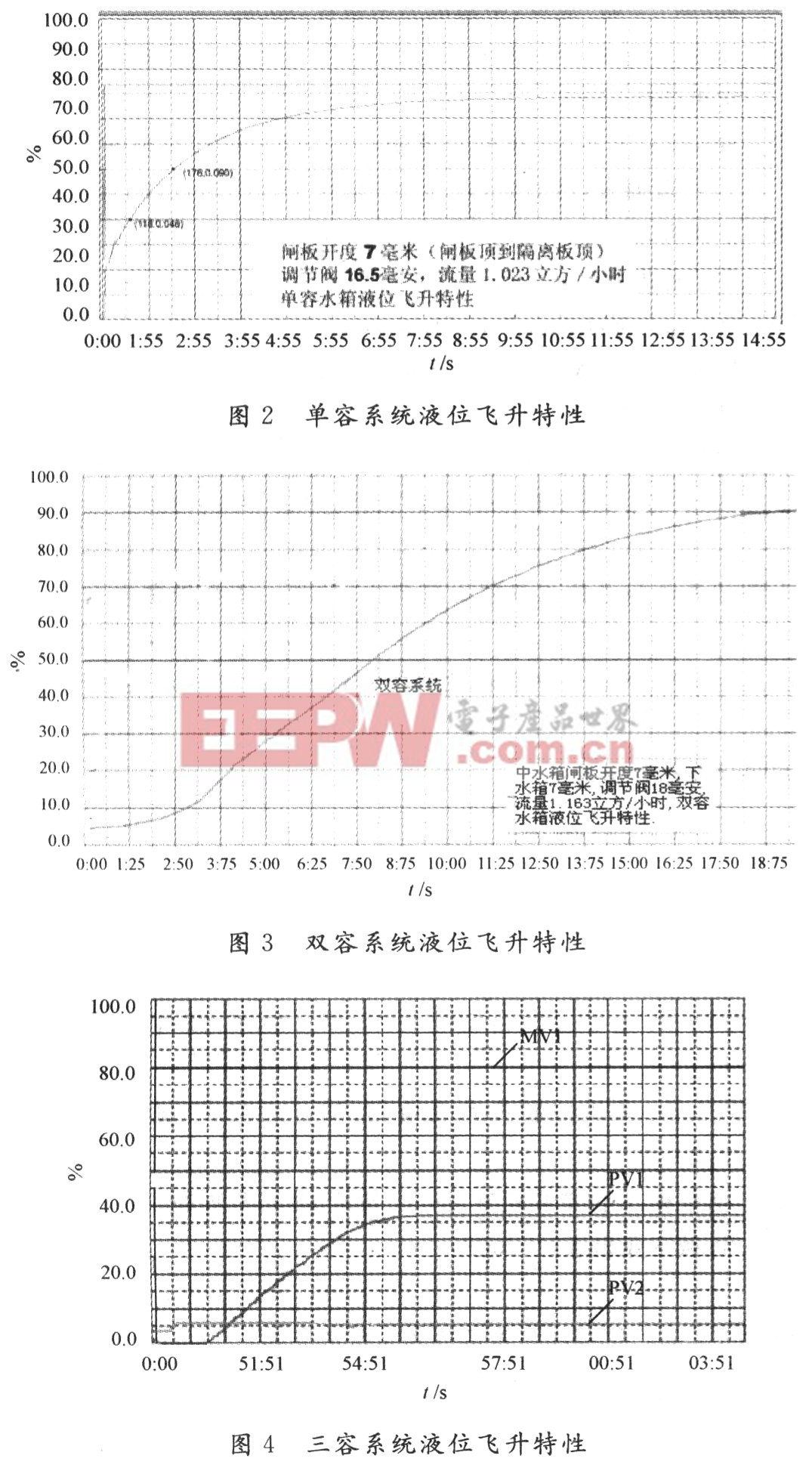
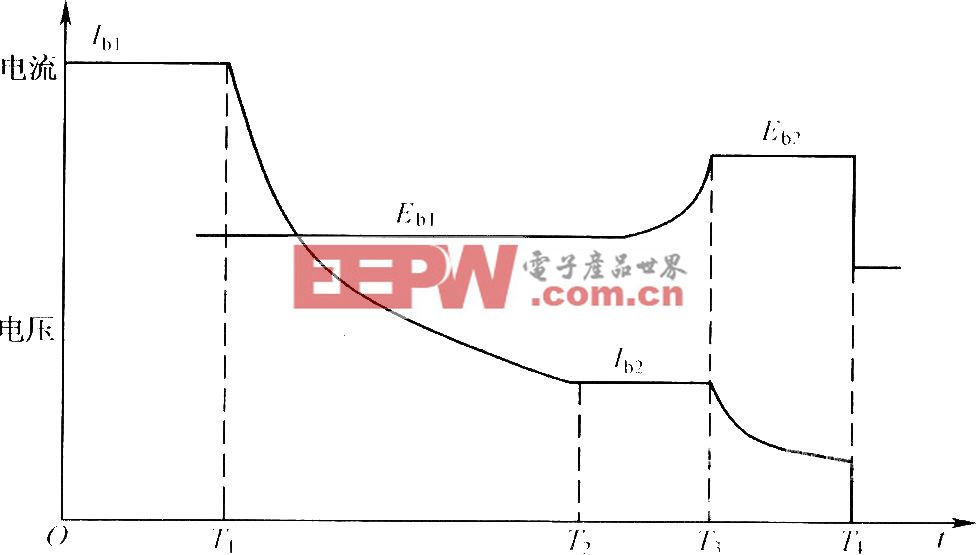
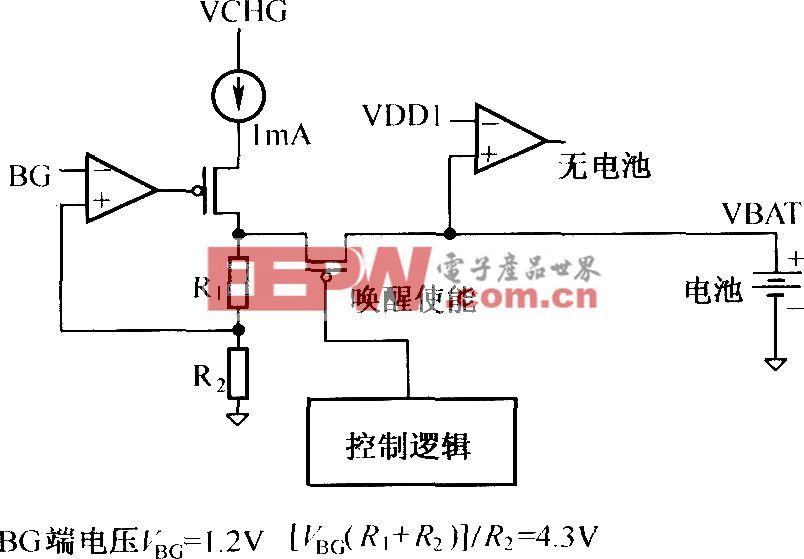
不同系統水位階躍響應曲線如圖2~圖4所示。
由于三容系統比較復雜,特別是當工業對象特性本身不是簡單同樣容器豎直疊加時,公式更加復雜,所以這里只給出一個簡單的數學模型公式,目的在于通過單容、雙容的模型測量,獲得一個向多容積系統控制推導的經驗方法。
3 多容系統的PID控制推導
單容實驗時,利用數字模型調整PID值,分別在P=10,I=100 s,D=0 s時獲得了比較好的結果。
雙容實驗時,利用數學模型調整PID值,分別在P=5,I=200 s,D=0 s時獲得了比較好的結果。
對于這種二階函數,系統穩定時間與其慣性時間有一定關系,而這個時間和PID的積分時間成一個等指數關系。隨著容器的串聯,導致時間成指數增加,肯定會比線性加倍的方式快,推出如下可能的經驗公式:

式中:t為容器特性時間;K為與系統有關的比例系數。這樣推出:兩容串聯,其PID積分時間TI=200 s,三容串聯,其PID積分時間TI=400 s,四容串聯,其TI=800 s。![]()
式中:t為容器特性時間,K為與系統有關的比例系數。
這樣推出:兩容串聯,其PID積分時間TI=270 s,三容串聯,其PID積分時間TI=745 s,四容串聯,其TI=2 030 s。




評論