LabVIEW NI SoftMotion和C系列驅(qū)動接口入門

完成以下步驟,將NI 9512驅(qū)動接口連接到P70530直流驅(qū)動或者P70360交流驅(qū)動和其它I/O。圖10中是一幅簡化的連接圖。
1. 根據(jù)機(jī)箱文檔說明,在機(jī)箱中安裝模塊。
2. 采用NI 9512-to-P7000線纜,將D-sub連接頭模塊連接到P7000系列驅(qū)動上的Command I/O連接頭上。該線纜為步進(jìn)式輸出、驅(qū)動使能輸出和驅(qū)動錯誤信號提供連接。
3. 將電源連接到NI 9512-to-P7000上的直接連接線纜+24 V輸入。
4. 采用接線盒線纜,將MDR連接頭模塊連接到37管腳的接線塊上。
5. 將硬件設(shè)備上的其它I/O信號連接到37管腳接線塊或者自定義線纜上。參考圖11了解接線盒的引腳。
a.將接線塊上的Forward Limit(前向限位)、Reverse Limit(反向限位)和Home(原點(diǎn)) 輸入連接到限位和原點(diǎn)傳感器上。
b.如果你使用編碼器來反饋位置信息,則請將編碼器的輸入連接到編碼器上。
c.采用所提供的接線端,連接所有額外I/O。
6. 將驅(qū)動電源連接到P7000驅(qū)動上。

圖10. NI 9512-to-P7000系列驅(qū)動連接圖
注意:如果只需要將MDR連接頭連接到接線盒上,則接線盒上的所有D-Sub信號都是無連接(no connects,NC)。圖11中顯示了只連接MDR連接頭時的37管腳接線盒的引腳。
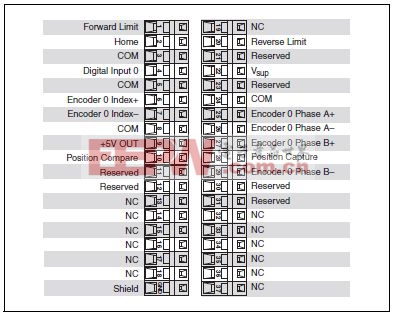
圖11. NI 9512 37管腳接線塊只連接MDR時的管腳分配
7. 在控制器中安裝軟件,創(chuàng)建一個LabVIEW項(xiàng)目,并添加NI SoftMotion軸。
8. 在項(xiàng)目瀏覽器窗口中右擊軸,并從快捷菜單中選擇屬性,打開軸配置對話框。
9. 針對P7000驅(qū)動,在軸配置對話框中改變下述項(xiàng)目的默認(rèn)軸設(shè)置:
a. 右擊軸,并從快捷菜單中選擇屬性,顯示軸配置對話框。
b. 在步進(jìn)電機(jī)頁面中,將輸出方式設(shè)置為單端。
c. 在運(yùn)動I/O頁面的驅(qū)動信號標(biāo)簽頁中,將驅(qū)動使能信號的輸出方式設(shè)置為源輸出。
d. 在數(shù)字I/O頁面中,將驅(qū)動器錯誤/報(bào)警映射到DI 1,并將輸入方式設(shè)置為源輸入。
10. 在項(xiàng)目瀏覽器窗口中單擊控制器項(xiàng)目,并選擇部署全部來部署軸信息。
連接到伺服式驅(qū)動器
伺服式軸的配置
伺服式軸只能以閉環(huán)模式運(yùn)行,所以必需有一個反饋設(shè)備。如果你使用NI 9514或者NI 9516驅(qū)動接口模塊,那么你必須另外對反饋設(shè)備、伺服控制環(huán)和伺服驅(qū)動的驅(qū)動命令輸出進(jìn)行配置。圖6中顯示了NI 9514和NI 9516 C系列模塊的軸配置對話框部分。無法配置的部分以灰色顯示。

圖6. NI 9514和NI 9516模塊的軸配置對話框
使用增益調(diào)節(jié)測試面板
使用Gain Tuning Test Panel(增益調(diào)節(jié)測試面板)來調(diào)節(jié)控制環(huán)的設(shè)置,并計(jì)算伺服軸的相對穩(wěn)定性。參考NI SoftMotion LabVIEW幫助中的“使用增益調(diào)節(jié)面板”部分,了解關(guān)于增益調(diào)節(jié)面板和伺服式系統(tǒng)調(diào)節(jié)指令方面的詳細(xì)信息。
右擊項(xiàng)目瀏覽器窗口中的軸,并從快捷菜單中選擇交互式測試面板,訪問增益調(diào)節(jié)面板。
您所學(xué)到的東西
本指南中,分析了使用LabVIEW NI SoftMotion和NI 951x C系列模塊來開發(fā)運(yùn)動應(yīng)用中的幾個概念,如下:
NI 951x模塊與大多數(shù)C系列模塊的不同之處在于,當(dāng)你使用掃描接口模式的時候,不能直接在項(xiàng)目瀏覽器窗口中對它們進(jìn)行配置,而且模塊中不能直接獲得I/O變量。
你必須使用NI SoftMotion向RT目標(biāo)中增加軸,并將它們與NI 951x模塊相關(guān)聯(lián),以期以掃描接口模式配置并使用它們。然后,你可以在VI中使用與這些軸相關(guān)聯(lián)的運(yùn)動I/O資源。
NI SoftMotion軸使用Axis Configuration對話框進(jìn)行配置。
NI SoftMotion功能塊允許你使用功能塊編程方式來創(chuàng)建確定性運(yùn)動控制應(yīng)用。
NI SoftMotion功能塊為高級狀態(tài)監(jiān)測提供了狀態(tài)輸出。











評論