基于DSP+CPLD 可重構數控系統的設計與仿真

在一個周期內產生的四倍頻計數脈沖輸出S,方向判別信號J,通過一個16 位可逆計數就可以實現對伺服裝置的位置檢測,實現位置伺服控制系統的控制。
3、控制算法的設計
(1).控制模型
數控機床的最高運動速度、跟蹤精度、定位精度等重要指標均取決于驅動及位置控制系統的動態與靜態性能。因此,研究與開發高性能的驅動系統及位置控制系統,一直是研究數控機床的關鍵技術之。日前數控機床位置伺服控制仍然普遍應用經典控制方法,如比例型或比例一積分型等算法,其優點是算法簡便,易于實現,但存在著控制參數的適應性差、抗十擾能力不強等缺陷。為了適應制造業對高效率地生產高質量產品日標的追求以及對形狀愈來愈復雜零件的加工需要,要求不斷地改善與提高位置伺服系統的穩態精度、動態響應特性,對系統參數變化的自適應性和抗干擾性,因而采用并發展先進的控制技術是必然趨勢。可惜的是,目前提出的諸多控制算法中,具有實用價值的技術極少,主要表現在:①受算法計算量等限制,難以滿足控制的實時性要求;②控制理論在參數設計及穩定性分析等方面不完善;③建模誤差對控制品質的限制。
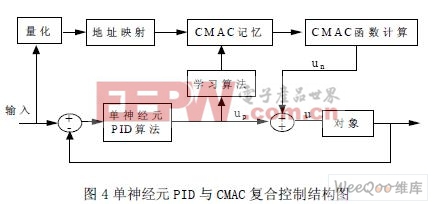
本文利用神經網絡的自學習功能,設計了一種在線單神經元PID 與CMAC 并行控制智能型位置控制器,并將之用到數控系統的實時控制中,取得了很好的控制效果,控制模型結構如圖:
(2)仿真和實現
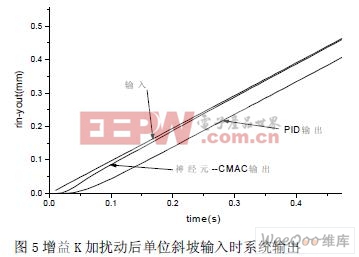
采用的單神經元PID及CMAC 相結合的復合控制算法,完成對位置伺服控制器典型輸入斜坡輸入響應的仿真實驗。圖5 是位置伺服系統的單位斜坡輸入在輸入端加入10%的階躍擾動后,兩種控制算法的輸出曲線圖,通過對圖形的分析,可以看出,單神經元PID 與CMAC相結合控制算法比常規PID 控制算法有更小的跟隨誤差,和更好的抗干擾能力。這個在位置伺服控制系統中更為重要。
4、結束語
利用計算控制功能強大的DSP 芯片構建了數控系統平臺,應用CPLD 解決了系統不同應用場合邏輯電路變化的問題,從硬件上實現了可重構性。控制算法較常規PID 控制有更好的動態特性、控制精度、抗干擾能力,而且具有自適應功能。該系統是一種開放的系統,可以使用戶很方便的不斷進行軟、硬件升級,一定時間內跟上數控技術發展的步伐。

伺服電機相關文章:伺服電機工作原理










評論