CPLD在雙軸位置檢測(cè)系統(tǒng)中的應(yīng)用
作者:
時(shí)間:2009-08-31
來(lái)源:網(wǎng)絡(luò)
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
3 位置檢測(cè)系統(tǒng)組成
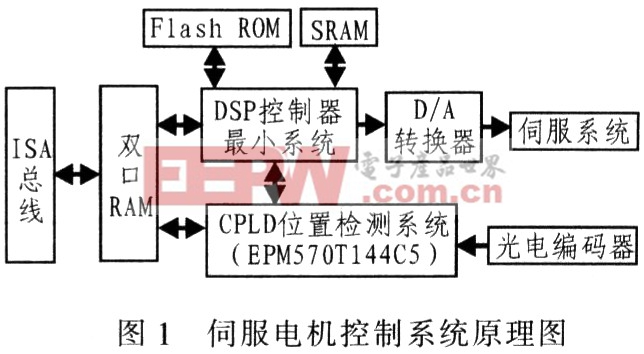
在介紹位置檢測(cè)系統(tǒng)前,先簡(jiǎn)要介紹伺服電機(jī)控制系統(tǒng)(圖1)。CPLD先對(duì)伺服電機(jī)光電編碼器上發(fā)出的反饋信號(hào)進(jìn)行譯碼、四倍頻鑒相計(jì)數(shù),然后將計(jì)數(shù)值存入鎖存器,當(dāng)用于電機(jī)控制的DSP控制器對(duì)CPLD進(jìn)行讀操作時(shí),CPLD將鎖存器里的計(jì)數(shù)值通過(guò)三態(tài)門(mén)輸出給DSP控制器,由其控制電機(jī)的位移和速度。
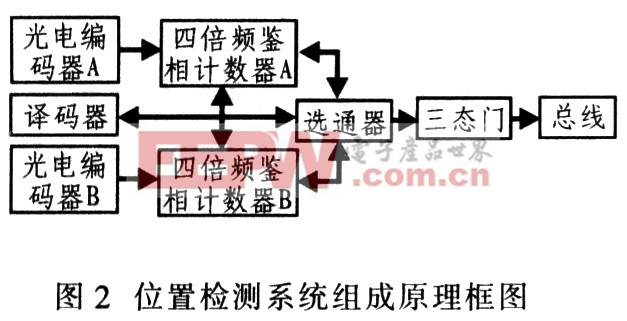
位置檢測(cè)系統(tǒng)采用CPLD器件實(shí)現(xiàn)硬件電路功能,用VHDL語(yǔ)言編程實(shí)現(xiàn)譯碼器、四倍頻鑒相計(jì)數(shù)器、選通器等模塊。圖2為位置檢測(cè)系統(tǒng)組成原理圖。圖2 中,光電編碼器A和四倍頻鑒相計(jì)數(shù)器A(光電編碼器B和四倍頻鑒相計(jì)數(shù)器B)構(gòu)成單軸計(jì)數(shù)電路,將兩個(gè)單軸計(jì)數(shù)電路配合譯碼器、選通器則構(gòu)成雙軸計(jì)數(shù)電路,就是用譯碼器控制選通器,以選通兩個(gè)計(jì)數(shù)器的計(jì)數(shù)結(jié)果并傳輸?shù)娇偩€(xiàn).總線(xiàn)和選通器之間增加三態(tài)門(mén)進(jìn)行控制。這樣就實(shí)現(xiàn)雙軸位置檢測(cè)。













評(píng)論