一種基于FPGA/MCU結構的線性調頻高度表

n 為當前高度所對應的分頻系數,誤差量Δn 取為5(對應的高度誤差量為±5m),在(n- Δn)→(n+Δn)范圍內從低到高進行搜索。如n 小于6,則從1→(n+Δn)進行搜索。如 該誤差搜索區域內的最小n 值都能滿足鎖定條件,則以該最小n 值為當前n 值,再產生誤差 搜索區域進行跟蹤。如在整個誤差搜索區域內都未出現鎖定信號,高度表從跟蹤狀態轉為搜 索狀態。 誤差抖動跟蹤算法的流程圖如圖3 所示。
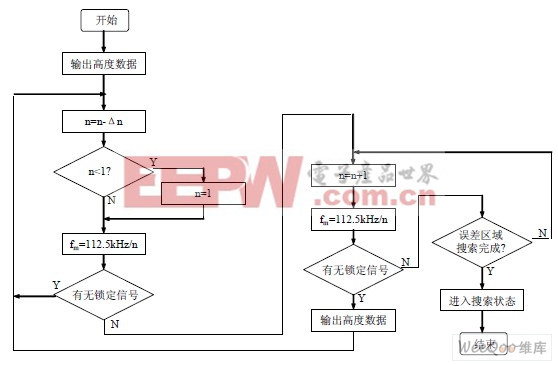
圖 3 誤差抖動跟蹤算法的流程圖
4 飛行試驗
該高度表采用動力滑翔機,進行了多個架次的飛行試驗,飛行地貌有城市、田地、樹林、 水面等,最高飛行高度超過1500m。試驗過程中高度表性能穩定,數據完整,50m 以下高度的 測高精度可達1m。
5 結束語
本文介紹了一種新型調頻連續波高度表,主要創新點在于:采用了FPGA/單片機的硬件 平臺,通用性強,并具備現場軟件升級能力;通過軟件算法實現了高度搜索、高度跟蹤、STC、 AGC 等功能,改變信號處理算法和控制軟件能實現多種功能,滿足更多應用場合的需要;采 用恒定差拍結構,抗干擾能力強,并具有頻譜前沿跟蹤能力;具有0?1500m 的大范圍測高能 力,在低高度上具有1m 的測高精度。
該高度表已用于某型無人機,創造經濟效益50 萬元。









評論