基于FPGA的空間目標碰撞預警系統

4.2 MicroBlaze軟核控制器與CAM的連接
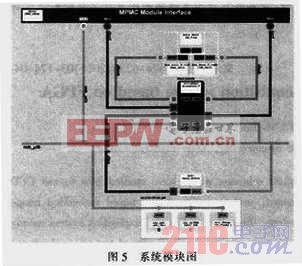
在FPGA芯片中配置一個MicroBlaze軟核控制器以實現對CAM的一系列控制,如復位、寫入數據、讀取數據等,MicroBlaze通過PLB總線與CAM相連,同時為便于調試,在PLB總線上連接了串口等外設模塊,系統模塊圖如圖5所示。本文引用地址:http://www.104case.com/article/191257.htm
4.3 系統執行
系統執行過程中,Microblaze作為控制器通過執行由C語言編寫的軟件程序實現對CAM的控制,它的具體操作流程如圖6所示。

在系統內部,整個工程的實現和下載共分成4步:首先產生系統的硬件網表,即對嵌入式系統進行綜合;其次產生系統硬件架構的比特流文件;再次編譯軟件,并將軟件代碼生成的比特流和系統硬件的比特流合二為一,構成完整的系統描述比特流;最后將完整的比特流下載到FPGA芯片中。
4.4 驗證結果分析
經過對處理結果分析可知,此系統驗證了設計算法的正確性。所搭建系統時鐘頻率為62.5 MHz,時鐘周期為16 ns,通過在代碼內部添加時鐘計數器,并且使用ChipScope邏輯分析儀進行波形分析,可知系統執行一次篩選操作所需要的時鐘周期數為114 296 649個,即1.8 s左右。
4.5 系統擴展能力分析
在后續研究中通過對CAM容量的擴展,可以增加待篩選目標的數量。CAM容量的擴展,需要占用更多的FPGA芯片資源,同時其運行頻率會有所降低,以某Spartan3A芯片為例,三者之間的關系如表3、表4、表5所示。

考慮到成本問題,本設計所使用的芯片為賽靈思公司的型號為XC3S700AN,由表3~表5可知,在擴展CAM容量時,需要綜合考慮所需CAM容量、所選FPGA芯片資源情況以及運行頻率三者之間的關系。
5 結論
采用賽靈思公司MicroBlaze軟核控制器和內容可尋址存儲器(CAM)所搭建的目標碰撞預警平臺實現了總目標數為16的目標群中危險目標的篩選操作。軟核控制器與CAM模塊同在一片FPGA芯片中實現,管理和操作起來比較方便,便于系統實現小型化、集成化。受到FPGA自身容量的限制,在擴展CAM容量時可以考慮選用更大容量的FPGA芯片,或者應用外接大容量專有CAM芯片,實現大規模目標的并行匹配操作。











評論