CPLD在DSP系統中的應用設計

當系統出現錯誤時,可以采用手工方式復位。
復位信號產生原理圖如圖2所示。其中,RST#為整個系統的復位信號,由MAX7000輸出。PBSW_RST#為手動復位信號,由按鍵接入MAX7000,經MAX7000去抖動后輸出給TPS3307。SVS_RST#為電源管理芯片TPS3307產生的復位信號(包括手動復位和電源監控功能)。本文引用地址:http://www.104case.com/article/191213.htm
1.2.2 BOOT模式的實現
系統復位后,DSP需要進行BOOT自舉。在復位信號為低期間,BOOTMODE[4:0]管腳上的設置值被鎖存,決定芯片的存儲器映射方式以及自舉模式。但TMS320C6202沒有專門的管腳作為BOOTMODE[4:0]輸入管腳,而是將擴展總線的XD[4:0]映射為BOOTMODE[4:0],利用上拉/下拉電阻在復位時進行芯片啟動模式設置。總線上的其它位也在復位期間被鎖定,決定系統相應的設定值。而擴展總線XD在HPI口讀寫時要用到,所以使用MAX7000進行隔離。系統處在復位階段,則通過MAX7000使得DSP的相應管腳的值等于設定值,復位結束后,MAX7000相應管腳為高阻態,使得XD可以作為正常的總線使用。
DSP自舉有特定的時間要求。在復位結束后,XD的配置管腳必須保持一段時間,TMS320C6202要求時間為5個時鐘周期,例如在200MHz時鐘情況下必須保持25ns。
1.2.3 HPI口接口邏輯實現
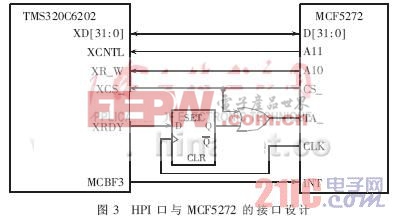
MPEG-4壓縮編碼器壓縮后的數據,通過網絡傳輸控制模塊傳輸到網絡上去,從而實現網絡實時圖像傳輸。而DSP與網絡傳輸模塊(MCF5272)通過HPI口連接。其接口邏輯由CPLD完成。硬件連線圖如圖3所示。
根據系統的邏輯要求以及實際的仿真結果,CPLD選用EPM7128SLC84。該芯片共有2500門,128個宏單元,最多100個用戶自定義管腳。
2 CPLD邏輯控制的具體實現
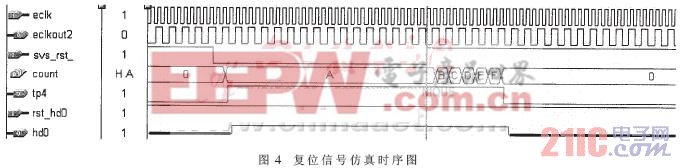
2.1 復位信號的實現
復位信號邏輯產生較簡單,需要處理的是按鍵的去抖動。由于按鍵是機械觸點,當機械觸點斷開、閉合時會有抖動,為使每一次按鍵只作一次響應,就必須考慮去除抖動。在通過按鍵獲得復位信號為低的信息時,不是立即認定按鍵已被按下,而是延時一段時間后再次檢測復位信號。如果仍為低,說明按鍵的確按下了,這實際上是避開了按鍵按下時的抖動時間。同樣,在檢測到按鍵釋放后,再延時幾個毫秒,消除后沿的抖動,然后再對鍵值處理。由于抖動現象主要出現在按鍵按下后,采用延時方法可有效地減少按鍵的抖動現象。











評論