基于FPGA的生命探測儀算法研究與系統設計

3.2 異步FIFO設計
FIFO是一種先入先出的內存數組,其控制邏輯將執行所有必要的讀寫指針管理,并產生狀態標志信號和可選擇的與用戶邏輯電路接口連接的握手信號。由于數據采樣數率遠遠小于串口數據傳輸速率,濾波器輸出與串行通信接口之間要進行數據緩存,這里使用異步FIFO模塊實現不同時鐘模塊間的數據傳送。圖5所示是異步FIFO時序仿真波形。本文引用地址:http://www.104case.com/article/190438.htm
。其中m為所用寄存器位數,Baud為波特率,clk為時鐘頻率。系統全局時鐘為40 MHz,傳輸波特率為19.2 Kb/s。可由此式算出分頻因子X=31.5,四舍五入后得X=32,實際產生的波特率為Baudclk=19 193,跟理想的19 200波特率誤差為0.04%。
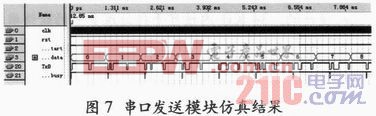
3.3.2 串口發送模塊
串口發送模塊主要實現將FIFO輸出的8位并行數據封8進行串行發送的功能。發送時對于異步傳輸協議,不需要同接收端進行時間同步。幀的傳送靠起始位來同步,起始位低電平,用下降沿沿通知對方接收方傳輸的開始,緊跟著是8位數據位,傳輸時低位元在前,高位在后。數據位后面是停止位,高電平有效。串口發送模塊仿真結果如圖7所示。
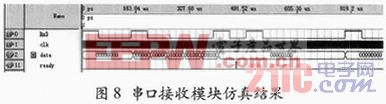
3.3.3 串口接收模塊
串口接收模塊主要實現將上位機發送的串行數據轉換成并行數據的功能。接收模塊實際上是發送模塊的逆過程,當檢測到低電平時,表示有資料到來。為了確定新數據的到來,即檢測開始位,我們使用8倍于波特率的采樣時鐘對接收到的信號進行采樣,以防止因為毛刺等造成錯誤判斷。當8位數據接收完成后,ready輸出高電平,數據輸出有效。串口接收模塊仿真結果如圖8所示。
4 結語
本文從理淪上研究了雷達式生命探測儀的算法,推導出了人體呼吸和運動所產生的多普勒頻移范圍,設計了生命探測儀信號處理板硬件系統,并詳細介紹了利用FPGA實現濾波、異步存取以及數據收發和控制。利用FPGA與ARM9的結合,實現了生命探測儀的小型化與便攜化。實驗證明,本項目開發的生命探測儀達到了隔墻心跳探測大于4 m,人體移動大于10 m,實現了較高的戰術指標。













評論